 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Objectness Score for Accurate and Fast Detection during Navigation
Paper and Code
Aug 26, 2019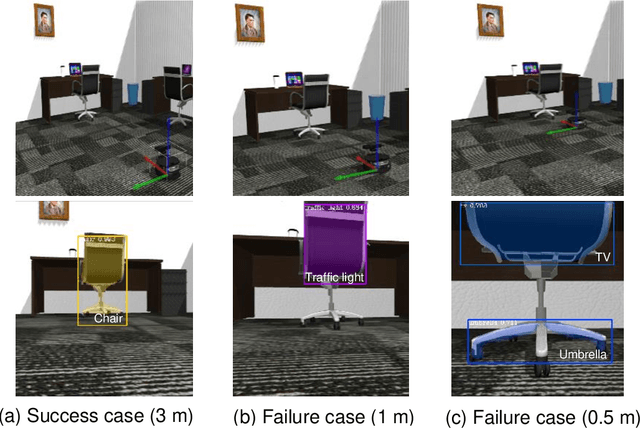
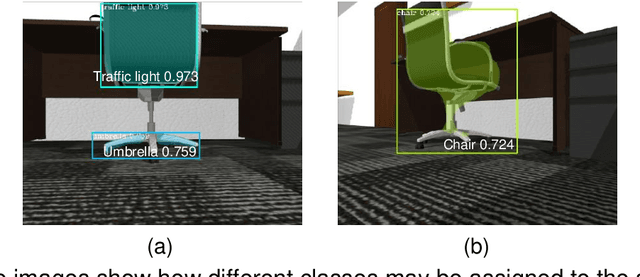
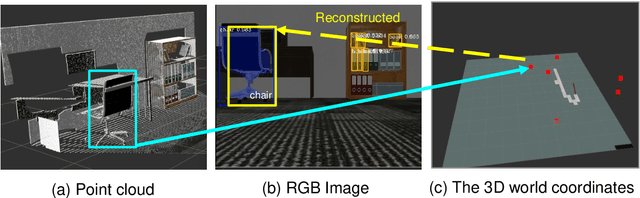
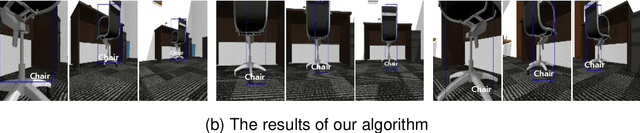
We propose a novel method utilizing an objectness score for maintaining the locations and classes of objects detected from Mask R-CNN during mobile robot navigation. The objectness score is defined to measure how well the detector identifies the locations and classes of objects during navigation. Specifically, it is designed to increase when there is sufficient distance between a detected object and the camera. During the navigation process, we transform the locations of objects in 3D world coordinates into 2D image coordinates through an affine projection and decide whether to retain the classes of detected objects using the objectness score. We conducted experiments to determine how well the locations and classes of detected objects are maintained at various angles and positions. Experimental results showed that our approach is efficient and robust, regardless of changing angles and distances.