 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Humanoid Locomotion over Uneven Terrain With Streamlined Perception-Control Pipeline
Nov 30, 2020
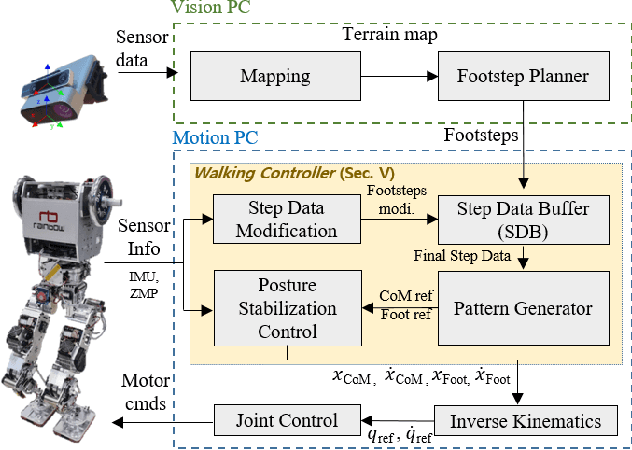
Although bipedal locomotion provides the ability to traverse unstructured environments, it requires careful planning and control to safely walk across without falling. This poses an integrated challenge for the robot to perceive, plan, and control its movements, especially with dynamic motions where the robot may have to adapt its swing-leg trajectory onthe-fly in order to safely place its foot on the uneven terrain. In this paper we present an efficient geometric footstep planner and the corresponding walking controller that enables a humanoid robot to dynamically walk across uneven terrain at speeds up to 0.3 m/s. As dynamic locomotion, we refer first to the continuous walking motion without stopping, and second to the on-the-fly replanning of the landing footstep position in middle of the swing phase during the robot gait cycle. This is mainly achieved through the streamlined integration between an efficient sampling-based planner and robust walking controller. The footstep planner is able to generate feasible footsteps within 5 milliseconds, and the controller is able to generate a new corresponding swing leg trajectory as well as the wholebody motion to dynamically balance the robot to the newly updated footsteps. The proposed perception-control pipeline is evaluated and demonstrated with real experiments using a fullscale humanoid to traverse across uneven terrains featured by static stepping stones, dynamically movable stepping stone, or narrow path.