 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFunctional MRI Time Series Generation via Wavelet-Based Image Transform and Spectral Flow Matching for Brain Disorder Identification
May 28, 2026Functional Magnetic Resonance Imaging (fMRI) provides non-invasive access to dynamic brain activity by measuring blood oxygen level-dependent (BOLD) signals over time. However, the resource-intensive nature of fMRI acquisition limits the availability of high-fidelity samples required for data-driven brain analysis models. While modern generative models can synthesize fMRI data, they often remain challenging in replicating their inherent non-stationarity, intricate spatiotemporal dynamics, and physiological variations of raw BOLD signals. To address these challenges, we propose Dual-Spectral Flow Matching (DSFM), a novel fMRI generative framework that cascades dual frequency representation of BOLD signals with spectral flow matching. Specifically, our framework first converts BOLD signals into a wavelet decomposition map via a discrete wavelet transform (DWT) to capture globalized transient and multi-scale variations, and projects into the discrete cosine transform (DCT) space across brain regions and time to exploit localized energy compaction of low-frequency dominant BOLD coefficients. Subsequently, a spectral flow matching model is trained to generate class-conditioned cosine-frequency representation. The generated samples are reconstructed through inverse DCT and inverse DWT operations to recover physiologically plausible time-domain BOLD signals. This dual-transform approach imposes structured frequency priors and preserves key physiological brain dynamics. Ultimately, we demonstrate the efficacy of our approach through improved downstream fMRI-based brain network classification. The code is available at https://github.com/htew0001/DSFM.git .
KnowDiffuser: A Knowledge-Guided Diffusion Planner with LM Reasoning and Prior-Informed Trajectory Initialization
Mar 11, 2026Recent advancements in Language Models (LMs) have demonstrated strong semantic reasoning capabilities, enabling their application in high-level decision-making for autonomous driving (AD). However, LMs operate over discrete token spaces and lack the ability to generate continuous, physically feasible trajectories required for motion planning. Meanwhile, diffusion models have proven effective at generating reliable and dynamically consistent trajectories, but often lack semantic interpretability and alignment with scene-level understanding. To address these limitations, we propose \textbf{KnowDiffuser}, a knowledge-guided motion planning framework that tightly integrates the semantic understanding of language models with the generative power of diffusion models. The framework employs a language model to infer context-aware meta-actions from structured scene representations, which are then mapped to prior trajectories that anchor the subsequent denoising process. A two-stage truncated denoising mechanism refines these trajectories efficiently, preserving both semantic alignment and physical feasibility. Experiments on the nuPlan benchmark demonstrate that KnowDiffuser significantly outperforms existing planners in both open-loop and closed-loop evaluations, establishing a robust and interpretable framework that effectively bridges the semantic-to-physical gap in AD systems.
RAPiD: Real-time Deterministic Trajectory Planning via Diffusion Behavior Priors for Safe and Efficient Autonomous Driving
Feb 07, 2026Diffusion-based trajectory planners have demonstrated strong capability for modeling the multimodal nature of human driving behavior, but their reliance on iterative stochastic sampling poses critical challenges for real-time, safety-critical deployment. In this work, we present RAPiD, a deterministic policy extraction framework that distills a pretrained diffusion-based planner into an efficient policy while eliminating diffusion sampling. Using score-regularized policy optimization, we leverage the score function of a pre-trained diffusion planner as a behavior prior to regularize policy learning. To promote safety and passenger comfort, the policy is optimized using a critic trained to imitate a predictive driver controller, providing dense, safety-focused supervision beyond conventional imitation learning. Evaluations demonstrate that RAPiD achieves competitive performance on closed-loop nuPlan scenarios with an 8x speedup over diffusion baselines, while achieving state-of-the-art generalization among learning-based planners on the interPlan benchmark. The official website of this work is: https://github.com/ruturajreddy/RAPiD.
Seeing Roads Through Words: A Language-Guided Framework for RGB-T Driving Scene Segmentation
Feb 07, 2026Robust semantic segmentation of road scenes under adverse illumination, lighting, and shadow conditions remain a core challenge for autonomous driving applications. RGB-Thermal fusion is a standard approach, yet existing methods apply static fusion strategies uniformly across all conditions, allowing modality-specific noise to propagate throughout the network. Hence, we propose CLARITY that dynamically adapts its fusion strategy to the detected scene condition. Guided by vision-language model (VLM) priors, the network learns to modulate each modality's contribution based on the illumination state while leveraging object embeddings for segmentation, rather than applying a fixed fusion policy. We further introduce two mechanisms, i.e., one which preserves valid dark-object semantics that prior noise-suppression methods incorrectly discard, and a hierarchical decoder that enforces structural consistency across scales to sharpen boundaries on thin objects. Experiments on the MFNet dataset demonstrate that CLARITY establishes a new state-of-the-art (SOTA), achieving 62.3% mIoU and 77.5% mAcc.
Drive As You Like: Strategy-Level Motion Planning Based on A Multi-Head Diffusion Model
Aug 23, 2025Recent advances in motion planning for autonomous driving have led to models capable of generating high-quality trajectories. However, most existing planners tend to fix their policy after supervised training, leading to consistent but rigid driving behaviors. This limits their ability to reflect human preferences or adapt to dynamic, instruction-driven demands. In this work, we propose a diffusion-based multi-head trajectory planner(M-diffusion planner). During the early training stage, all output heads share weights to learn to generate high-quality trajectories. Leveraging the probabilistic nature of diffusion models, we then apply Group Relative Policy Optimization (GRPO) to fine-tune the pre-trained model for diverse policy-specific behaviors. At inference time, we incorporate a large language model (LLM) to guide strategy selection, enabling dynamic, instruction-aware planning without switching models. Closed-loop simulation demonstrates that our post-trained planner retains strong planning capability while achieving state-of-the-art (SOTA) performance on the nuPlan val14 benchmark. Open-loop results further show that the generated trajectories exhibit clear diversity, effectively satisfying multi-modal driving behavior requirements. The code and related experiments will be released upon acceptance of the paper.
Learning Energy-Based Generative Models via Potential Flow: A Variational Principle Approach to Probability Density Homotopy Matching
Apr 22, 2025Energy-based models (EBMs) are a powerful class of probabilistic generative models due to their flexibility and interpretability. However, relationships between potential flows and explicit EBMs remain underexplored, while contrastive divergence training via implicit Markov chain Monte Carlo (MCMC) sampling is often unstable and expensive in high-dimensional settings. In this paper, we propose Variational Potential Flow Bayes (VPFB), a new energy-based generative framework that eliminates the need for implicit MCMC sampling and does not rely on auxiliary networks or cooperative training. VPFB learns an energy-parameterized potential flow by constructing a flow-driven density homotopy that is matched to the data distribution through a variational loss minimizing the Kullback-Leibler divergence between the flow-driven and marginal homotopies. This principled formulation enables robust and efficient generative modeling while preserving the interpretability of EBMs. Experimental results on image generation, interpolation, out-of-distribution detection, and compositional generation confirm the effectiveness of VPFB, showing that our method performs competitively with existing approaches in terms of sample quality and versatility across diverse generative modeling tasks.
ST-HCSS: Deep Spatio-Temporal Hypergraph Convolutional Neural Network for Soft Sensing
Jan 02, 2025
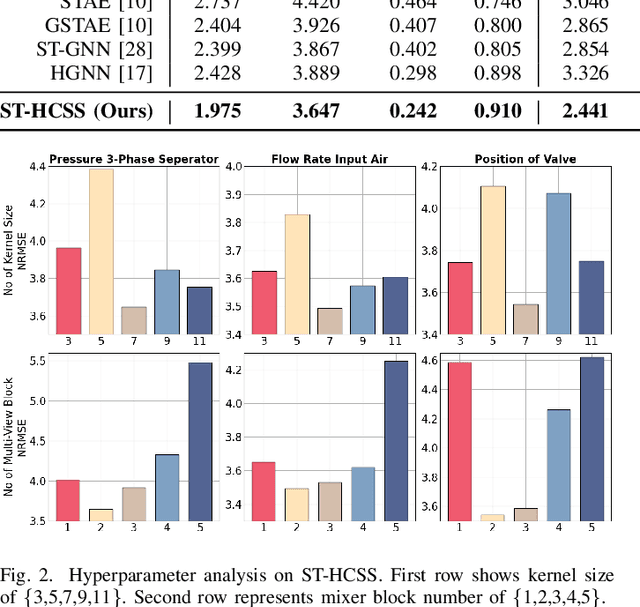


Higher-order sensor networks are more accurate in characterizing the nonlinear dynamics of sensory time-series data in modern industrial settings by allowing multi-node connections beyond simple pairwise graph edges. In light of this, we propose a deep spatio-temporal hypergraph convolutional neural network for soft sensing (ST-HCSS). In particular, our proposed framework is able to construct and leverage a higher-order graph (hypergraph) to model the complex multi-interactions between sensor nodes in the absence of prior structural knowledge. To capture rich spatio-temporal relationships underlying sensor data, our proposed ST-HCSS incorporates stacked gated temporal and hypergraph convolution layers to effectively aggregate and update hypergraph information across time and nodes. Our results validate the superiority of ST-HCSS compared to existing state-of-the-art soft sensors, and demonstrates that the learned hypergraph feature representations aligns well with the sensor data correlations. The code is available at https://github.com/htew0001/ST-HCSS.git
KANS: Knowledge Discovery Graph Attention Network for Soft Sensing in Multivariate Industrial Processes
Jan 02, 2025



Soft sensing of hard-to-measure variables is often crucial in industrial processes. Current practices rely heavily on conventional modeling techniques that show success in improving accuracy. However, they overlook the non-linear nature, dynamics characteristics, and non-Euclidean dependencies between complex process variables. To tackle these challenges, we present a framework known as a Knowledge discovery graph Attention Network for effective Soft sensing (KANS). Unlike the existing deep learning soft sensor models, KANS can discover the intrinsic correlations and irregular relationships between the multivariate industrial processes without a predefined topology. First, an unsupervised graph structure learning method is introduced, incorporating the cosine similarity between different sensor embedding to capture the correlations between sensors. Next, we present a graph attention-based representation learning that can compute the multivariate data parallelly to enhance the model in learning complex sensor nodes and edges. To fully explore KANS, knowledge discovery analysis has also been conducted to demonstrate the interpretability of the model. Experimental results demonstrate that KANS significantly outperforms all the baselines and state-of-the-art methods in soft sensing performance. Furthermore, the analysis shows that KANS can find sensors closely related to different process variables without domain knowledge, significantly improving soft sensing accuracy.
Cross-Domain Transfer Learning using Attention Latent Features for Multi-Agent Trajectory Prediction
Nov 12, 2024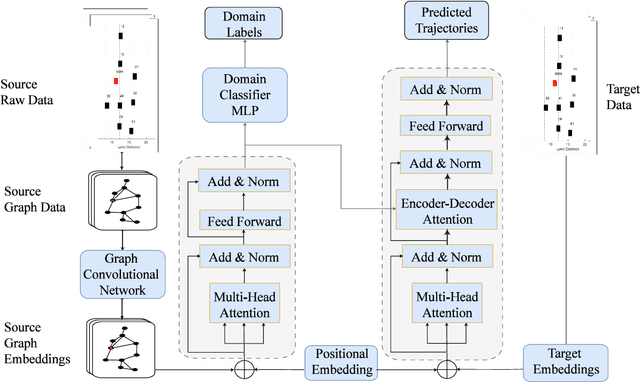
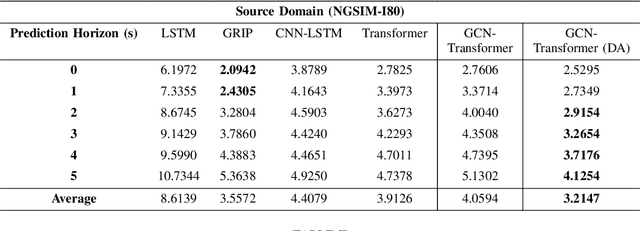
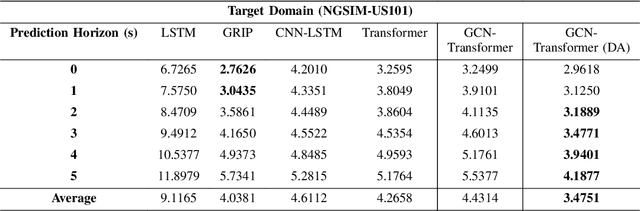
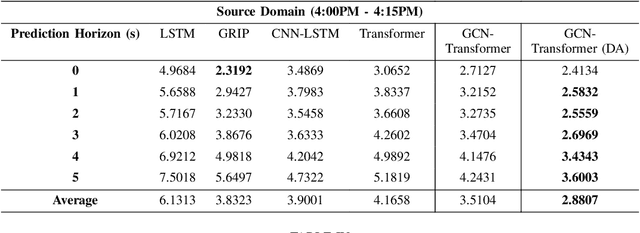
With the advancements of sensor hardware, traffic infrastructure and deep learning architectures, trajectory prediction of vehicles has established a solid foundation in intelligent transportation systems. However, existing solutions are often tailored to specific traffic networks at particular time periods. Consequently, deep learning models trained on one network may struggle to generalize effectively to unseen networks. To address this, we proposed a novel spatial-temporal trajectory prediction framework that performs cross-domain adaption on the attention representation of a Transformer-based model. A graph convolutional network is also integrated to construct dynamic graph feature embeddings that accurately model the complex spatial-temporal interactions between the multi-agent vehicles across multiple traffic domains. The proposed framework is validated on two case studies involving the cross-city and cross-period settings. Experimental results show that our proposed framework achieves superior trajectory prediction and domain adaptation performances over the state-of-the-art models.
Energy-efficient Hybrid Model Predictive Trajectory Planning for Autonomous Electric Vehicles
Nov 09, 2024To tackle the twin challenges of limited battery life and lengthy charging durations in electric vehicles (EVs), this paper introduces an Energy-efficient Hybrid Model Predictive Planner (EHMPP), which employs an energy-saving optimization strategy. EHMPP focuses on refining the design of the motion planner to be seamlessly integrated with the existing automatic driving algorithms, without additional hardware. It has been validated through simulation experiments on the Prescan, CarSim, and Matlab platforms, demonstrating that it can increase passive recovery energy by 11.74\% and effectively track motor speed and acceleration at optimal power. To sum up, EHMPP not only aids in trajectory planning but also significantly boosts energy efficiency in autonomous EVs.