 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFunctional MRI Time Series Generation via Wavelet-Based Image Transform and Spectral Flow Matching for Brain Disorder Identification
May 28, 2026Functional Magnetic Resonance Imaging (fMRI) provides non-invasive access to dynamic brain activity by measuring blood oxygen level-dependent (BOLD) signals over time. However, the resource-intensive nature of fMRI acquisition limits the availability of high-fidelity samples required for data-driven brain analysis models. While modern generative models can synthesize fMRI data, they often remain challenging in replicating their inherent non-stationarity, intricate spatiotemporal dynamics, and physiological variations of raw BOLD signals. To address these challenges, we propose Dual-Spectral Flow Matching (DSFM), a novel fMRI generative framework that cascades dual frequency representation of BOLD signals with spectral flow matching. Specifically, our framework first converts BOLD signals into a wavelet decomposition map via a discrete wavelet transform (DWT) to capture globalized transient and multi-scale variations, and projects into the discrete cosine transform (DCT) space across brain regions and time to exploit localized energy compaction of low-frequency dominant BOLD coefficients. Subsequently, a spectral flow matching model is trained to generate class-conditioned cosine-frequency representation. The generated samples are reconstructed through inverse DCT and inverse DWT operations to recover physiologically plausible time-domain BOLD signals. This dual-transform approach imposes structured frequency priors and preserves key physiological brain dynamics. Ultimately, we demonstrate the efficacy of our approach through improved downstream fMRI-based brain network classification. The code is available at https://github.com/htew0001/DSFM.git .
ST-HCSS: Deep Spatio-Temporal Hypergraph Convolutional Neural Network for Soft Sensing
Jan 02, 2025
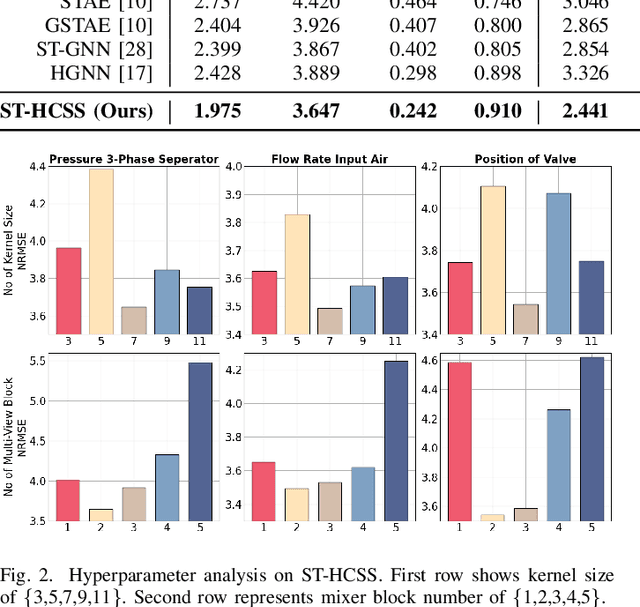


Higher-order sensor networks are more accurate in characterizing the nonlinear dynamics of sensory time-series data in modern industrial settings by allowing multi-node connections beyond simple pairwise graph edges. In light of this, we propose a deep spatio-temporal hypergraph convolutional neural network for soft sensing (ST-HCSS). In particular, our proposed framework is able to construct and leverage a higher-order graph (hypergraph) to model the complex multi-interactions between sensor nodes in the absence of prior structural knowledge. To capture rich spatio-temporal relationships underlying sensor data, our proposed ST-HCSS incorporates stacked gated temporal and hypergraph convolution layers to effectively aggregate and update hypergraph information across time and nodes. Our results validate the superiority of ST-HCSS compared to existing state-of-the-art soft sensors, and demonstrates that the learned hypergraph feature representations aligns well with the sensor data correlations. The code is available at https://github.com/htew0001/ST-HCSS.git
KANS: Knowledge Discovery Graph Attention Network for Soft Sensing in Multivariate Industrial Processes
Jan 02, 2025



Soft sensing of hard-to-measure variables is often crucial in industrial processes. Current practices rely heavily on conventional modeling techniques that show success in improving accuracy. However, they overlook the non-linear nature, dynamics characteristics, and non-Euclidean dependencies between complex process variables. To tackle these challenges, we present a framework known as a Knowledge discovery graph Attention Network for effective Soft sensing (KANS). Unlike the existing deep learning soft sensor models, KANS can discover the intrinsic correlations and irregular relationships between the multivariate industrial processes without a predefined topology. First, an unsupervised graph structure learning method is introduced, incorporating the cosine similarity between different sensor embedding to capture the correlations between sensors. Next, we present a graph attention-based representation learning that can compute the multivariate data parallelly to enhance the model in learning complex sensor nodes and edges. To fully explore KANS, knowledge discovery analysis has also been conducted to demonstrate the interpretability of the model. Experimental results demonstrate that KANS significantly outperforms all the baselines and state-of-the-art methods in soft sensing performance. Furthermore, the analysis shows that KANS can find sensors closely related to different process variables without domain knowledge, significantly improving soft sensing accuracy.
Cross-Domain Transfer Learning using Attention Latent Features for Multi-Agent Trajectory Prediction
Nov 12, 2024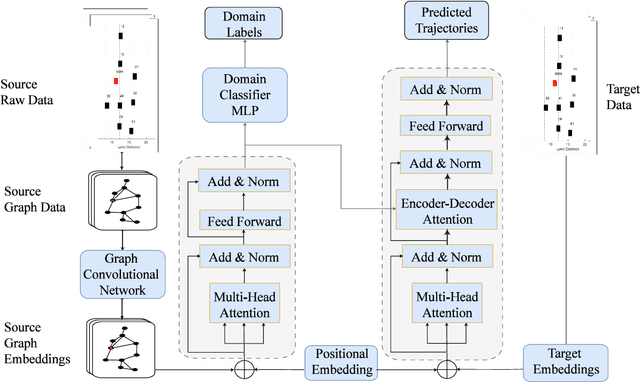
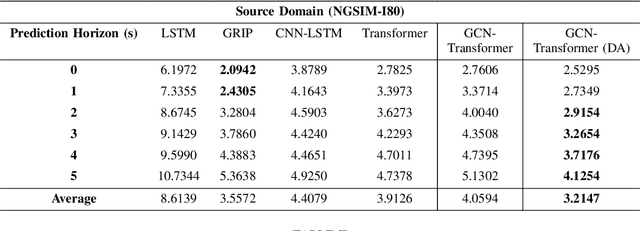
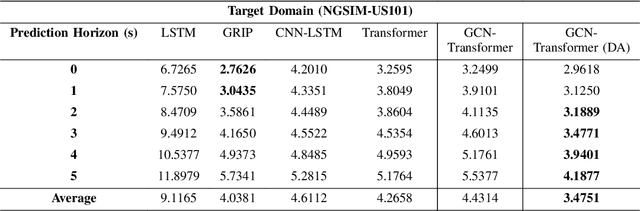
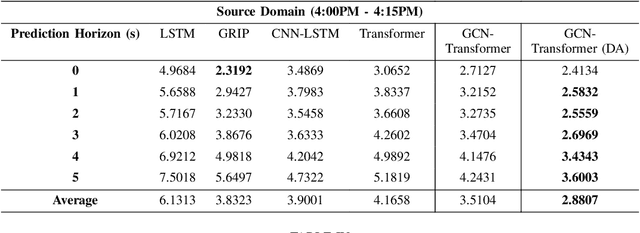
With the advancements of sensor hardware, traffic infrastructure and deep learning architectures, trajectory prediction of vehicles has established a solid foundation in intelligent transportation systems. However, existing solutions are often tailored to specific traffic networks at particular time periods. Consequently, deep learning models trained on one network may struggle to generalize effectively to unseen networks. To address this, we proposed a novel spatial-temporal trajectory prediction framework that performs cross-domain adaption on the attention representation of a Transformer-based model. A graph convolutional network is also integrated to construct dynamic graph feature embeddings that accurately model the complex spatial-temporal interactions between the multi-agent vehicles across multiple traffic domains. The proposed framework is validated on two case studies involving the cross-city and cross-period settings. Experimental results show that our proposed framework achieves superior trajectory prediction and domain adaptation performances over the state-of-the-art models.
Unsupervised Cross-Domain Soft Sensor Modelling via Deep Physics-Inspired Particle Flow Bayes
Jun 25, 2023



Data-driven soft sensors are essential for achieving accurate perception through reliable state inference. However, developing representative soft sensor models is challenged by issues such as missing labels, domain adaptability, and temporal coherence in data. To address these challenges, we propose a deep Particle Flow Bayes (DPFB) framework for cross-domain soft sensor modeling in the absence of target state labels. In particular, a sequential Bayes objective is first formulated to perform the maximum likelihood estimation underlying the cross-domain soft sensing problem. At the core of the framework, we incorporate a physics-inspired particle flow that optimizes the sequential Bayes objective to perform an exact Bayes update of the model extracted latent and hidden features. As a result, these contributions enable the proposed framework to learn a rich approximate posterior feature representation capable of characterizing complex cross-domain system dynamics and performing effective time series unsupervised domain adaptation (UDA). Finally, we validate the framework on a complex industrial multiphase flow process system with complex dynamics and multiple operating conditions. The results demonstrate that the DPFB framework achieves superior cross-domain soft sensing performance, outperforming state-of-the-art deep UDA and normalizing flow approaches.
Sigma-point Kalman Filter with Nonlinear Unknown Input Estimation via Optimization and Data-driven Approach for Dynamic Systems
Jun 21, 2023



Most works on joint state and unknown input (UI) estimation require the assumption that the UIs are linear; this is potentially restrictive as it does not hold in many intelligent autonomous systems. To overcome this restriction and circumvent the need to linearize the system, we propose a derivative-free Unknown Input Sigma-point Kalman Filter (SPKF-nUI) where the SPKF is interconnected with a general nonlinear UI estimator that can be implemented via nonlinear optimization and data-driven approaches. The nonlinear UI estimator uses the posterior state estimate which is less susceptible to state prediction error. In addition, we introduce a joint sigma-point transformation scheme to incorporate both the state and UI uncertainties in the estimation of SPKF-nUI. An in-depth stochastic stability analysis proves that the proposed SPKF-nUI yields exponentially converging estimation error bounds under reasonable assumptions. Finally, two case studies are carried out on a simulation-based rigid robot and a physical soft robot, i.e., robots made of soft materials with complex dynamics to validate effectiveness of the proposed filter on nonlinear dynamic systems. Our results demonstrate that the proposed SPKF-nUI achieves the lowest state and UI estimation errors when compared to the existing nonlinear state-UI filters.
Cross-domain Transfer Learning and State Inference for Soft Robots via a Semi-supervised Sequential Variational Bayes Framework
Mar 06, 2023



Recently, data-driven models such as deep neural networks have shown to be promising tools for modelling and state inference in soft robots. However, voluminous amounts of data are necessary for deep models to perform effectively, which requires exhaustive and quality data collection, particularly of state labels. Consequently, obtaining labelled state data for soft robotic systems is challenged for various reasons, including difficulty in the sensorization of soft robots and the inconvenience of collecting data in unstructured environments. To address this challenge, in this paper, we propose a semi-supervised sequential variational Bayes (DSVB) framework for transfer learning and state inference in soft robots with missing state labels on certain robot configurations. Considering that soft robots may exhibit distinct dynamics under different robot configurations, a feature space transfer strategy is also incorporated to promote the adaptation of latent features across multiple configurations. Unlike existing transfer learning approaches, our proposed DSVB employs a recurrent neural network to model the nonlinear dynamics and temporal coherence in soft robot data. The proposed framework is validated on multiple setup configurations of a pneumatic-based soft robot finger. Experimental results on four transfer scenarios demonstrate that DSVB performs effective transfer learning and accurate state inference amidst missing state labels.