 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Energy-Based Generative Models via Potential Flow: A Variational Principle Approach to Probability Density Homotopy Matching
Apr 22, 2025Energy-based models (EBMs) are a powerful class of probabilistic generative models due to their flexibility and interpretability. However, relationships between potential flows and explicit EBMs remain underexplored, while contrastive divergence training via implicit Markov chain Monte Carlo (MCMC) sampling is often unstable and expensive in high-dimensional settings. In this paper, we propose Variational Potential Flow Bayes (VPFB), a new energy-based generative framework that eliminates the need for implicit MCMC sampling and does not rely on auxiliary networks or cooperative training. VPFB learns an energy-parameterized potential flow by constructing a flow-driven density homotopy that is matched to the data distribution through a variational loss minimizing the Kullback-Leibler divergence between the flow-driven and marginal homotopies. This principled formulation enables robust and efficient generative modeling while preserving the interpretability of EBMs. Experimental results on image generation, interpolation, out-of-distribution detection, and compositional generation confirm the effectiveness of VPFB, showing that our method performs competitively with existing approaches in terms of sample quality and versatility across diverse generative modeling tasks.
Variational Potential Flow: A Novel Probabilistic Framework for Energy-Based Generative Modelling
Jul 21, 2024



Energy based models (EBMs) are appealing for their generality and simplicity in data likelihood modeling, but have conventionally been difficult to train due to the unstable and time-consuming implicit MCMC sampling during contrastive divergence training. In this paper, we present a novel energy-based generative framework, Variational Potential Flow (VAPO), that entirely dispenses with implicit MCMC sampling and does not rely on complementary latent models or cooperative training. The VAPO framework aims to learn a potential energy function whose gradient (flow) guides the prior samples, so that their density evolution closely follows an approximate data likelihood homotopy. An energy loss function is then formulated to minimize the Kullback-Leibler divergence between density evolution of the flow-driven prior and the data likelihood homotopy. Images can be generated after training the potential energy, by initializing the samples from Gaussian prior and solving the ODE governing the potential flow on a fixed time interval using generic ODE solvers. Experiment results show that the proposed VAPO framework is capable of generating realistic images on various image datasets. In particular, our proposed framework achieves competitive FID scores for unconditional image generation on the CIFAR-10 and CelebA datasets.
MDHA: Multi-Scale Deformable Transformer with Hybrid Anchors for Multi-View 3D Object Detection
Jun 25, 2024



Multi-view 3D object detection is a crucial component of autonomous driving systems. Contemporary query-based methods primarily depend either on dataset-specific initialization of 3D anchors, introducing bias, or utilize dense attention mechanisms, which are computationally inefficient and unscalable. To overcome these issues, we present MDHA, a novel sparse query-based framework, which constructs adaptive 3D output proposals using hybrid anchors from multi-view, multi-scale input. Fixed 2D anchors are combined with depth predictions to form 2.5D anchors, which are projected to obtain 3D proposals. To ensure high efficiency, our proposed Anchor Encoder performs sparse refinement and selects the top-k anchors and features. Moreover, while existing multi-view attention mechanisms rely on projecting reference points to multiple images, our novel Circular Deformable Attention mechanism only projects to a single image but allows reference points to seamlessly attend to adjacent images, improving efficiency without compromising on performance. On the nuScenes val set, it achieves 46.4% mAP and 55.0% NDS with a ResNet101 backbone. MDHA significantly outperforms the baseline, where anchor proposals are modelled as learnable embeddings.
Unsupervised Cross-Domain Soft Sensor Modelling via Deep Physics-Inspired Particle Flow Bayes
Jun 25, 2023



Data-driven soft sensors are essential for achieving accurate perception through reliable state inference. However, developing representative soft sensor models is challenged by issues such as missing labels, domain adaptability, and temporal coherence in data. To address these challenges, we propose a deep Particle Flow Bayes (DPFB) framework for cross-domain soft sensor modeling in the absence of target state labels. In particular, a sequential Bayes objective is first formulated to perform the maximum likelihood estimation underlying the cross-domain soft sensing problem. At the core of the framework, we incorporate a physics-inspired particle flow that optimizes the sequential Bayes objective to perform an exact Bayes update of the model extracted latent and hidden features. As a result, these contributions enable the proposed framework to learn a rich approximate posterior feature representation capable of characterizing complex cross-domain system dynamics and performing effective time series unsupervised domain adaptation (UDA). Finally, we validate the framework on a complex industrial multiphase flow process system with complex dynamics and multiple operating conditions. The results demonstrate that the DPFB framework achieves superior cross-domain soft sensing performance, outperforming state-of-the-art deep UDA and normalizing flow approaches.
Sigma-point Kalman Filter with Nonlinear Unknown Input Estimation via Optimization and Data-driven Approach for Dynamic Systems
Jun 21, 2023



Most works on joint state and unknown input (UI) estimation require the assumption that the UIs are linear; this is potentially restrictive as it does not hold in many intelligent autonomous systems. To overcome this restriction and circumvent the need to linearize the system, we propose a derivative-free Unknown Input Sigma-point Kalman Filter (SPKF-nUI) where the SPKF is interconnected with a general nonlinear UI estimator that can be implemented via nonlinear optimization and data-driven approaches. The nonlinear UI estimator uses the posterior state estimate which is less susceptible to state prediction error. In addition, we introduce a joint sigma-point transformation scheme to incorporate both the state and UI uncertainties in the estimation of SPKF-nUI. An in-depth stochastic stability analysis proves that the proposed SPKF-nUI yields exponentially converging estimation error bounds under reasonable assumptions. Finally, two case studies are carried out on a simulation-based rigid robot and a physical soft robot, i.e., robots made of soft materials with complex dynamics to validate effectiveness of the proposed filter on nonlinear dynamic systems. Our results demonstrate that the proposed SPKF-nUI achieves the lowest state and UI estimation errors when compared to the existing nonlinear state-UI filters.
Cross-domain Transfer Learning and State Inference for Soft Robots via a Semi-supervised Sequential Variational Bayes Framework
Mar 06, 2023



Recently, data-driven models such as deep neural networks have shown to be promising tools for modelling and state inference in soft robots. However, voluminous amounts of data are necessary for deep models to perform effectively, which requires exhaustive and quality data collection, particularly of state labels. Consequently, obtaining labelled state data for soft robotic systems is challenged for various reasons, including difficulty in the sensorization of soft robots and the inconvenience of collecting data in unstructured environments. To address this challenge, in this paper, we propose a semi-supervised sequential variational Bayes (DSVB) framework for transfer learning and state inference in soft robots with missing state labels on certain robot configurations. Considering that soft robots may exhibit distinct dynamics under different robot configurations, a feature space transfer strategy is also incorporated to promote the adaptation of latent features across multiple configurations. Unlike existing transfer learning approaches, our proposed DSVB employs a recurrent neural network to model the nonlinear dynamics and temporal coherence in soft robot data. The proposed framework is validated on multiple setup configurations of a pneumatic-based soft robot finger. Experimental results on four transfer scenarios demonstrate that DSVB performs effective transfer learning and accurate state inference amidst missing state labels.
HDR image watermarking using saliency detection and quantization index modulation
Feb 23, 2023High-dynamic range (HDR) images are circulated rapidly over the internet with risks of being exploited for unauthorized usage. To protect these images, some HDR image based watermarking (HDR-IW) methods were put forward. However, they inherited the same problem faced by conventional IW methods for standard dynamic range (SDR) images, where only trade-offs among conflicting requirements are managed instead of simultaneous improvement. In this paper, a novel saliency (eye-catching object) detection based trade-off independent HDR-IW is proposed, to simultaneously improve robustness, imperceptibility and payload. First, the host image goes through our proposed salient object detection model to produce a saliency map, which is, in turn, exploited to segment the foreground and background of the host image. Next, the binary watermark is partitioned into the foregrounds and backgrounds using the same mask and scrambled using a random permutation algorithm. Finally, the watermark segments are embedded into selected bit-plane of the corresponding host segments using quantized indexed modulation. Experimental results suggest that the proposed work outperforms state-of-the-art methods in terms of improving the conflicting requirements.
A Survey of Automatic Facial Micro-expression Analysis: Databases, Methods and Challenges
Jun 15, 2018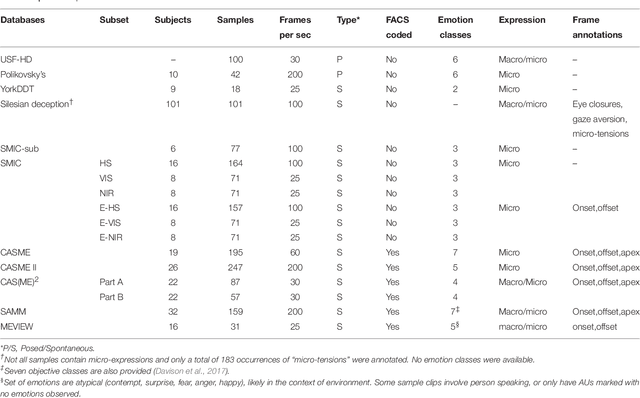


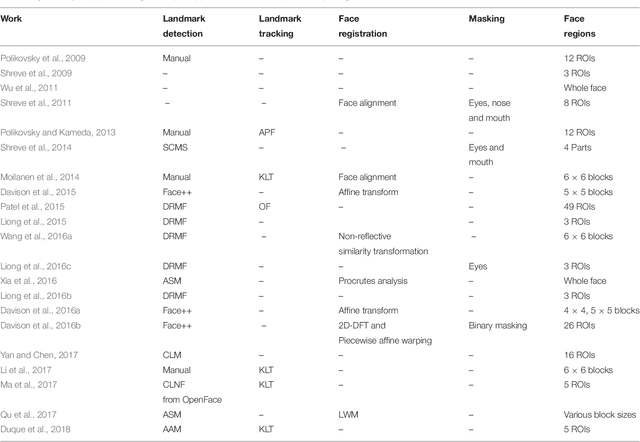
Over the last few years, automatic facial micro-expression analysis has garnered increasing attention from experts across different disciplines because of its potential applications in various fields such as clinical diagnosis, forensic investigation and security systems. Advances in computer algorithms and video acquisition technology have rendered machine analysis of facial micro-expressions possible today, in contrast to decades ago when it was primarily the domain of psychiatrists where analysis was largely manual. Indeed, although the study of facial micro-expressions is a well-established field in psychology, it is still relatively new from the computational perspective with many interesting problems. In this survey, we present a comprehensive review of state-of-the-art databases and methods for micro-expressions spotting and recognition. Individual stages involved in the automation of these tasks are also described and reviewed at length. In addition, we also deliberate on the challenges and future directions in this growing field of automatic facial micro-expression analysis.