 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe S3LI Vulcano Dataset: A Dataset for Multi-Modal SLAM in Unstructured Planetary Environments
Jan 27, 2026We release the S3LI Vulcano dataset, a multi-modal dataset towards development and benchmarking of Simultaneous Localization and Mapping (SLAM) and place recognition algorithms that rely on visual and LiDAR modalities. Several sequences are recorded on the volcanic island of Vulcano, from the Aeolian Islands in Sicily, Italy. The sequences provide users with data from a variety of environments, textures and terrains, including basaltic or iron-rich rocks, geological formations from old lava channels, as well as dry vegetation and water. The data (rmc.dlr.de/s3li_dataset) is accompanied by an open source toolkit (github.com/DLR-RM/s3li-toolkit) providing tools for generating ground truth poses as well as preparation of labelled samples for place recognition tasks.
Multi-modal Loop Closure Detection with Foundation Models in Severely Unstructured Environments
Nov 07, 2025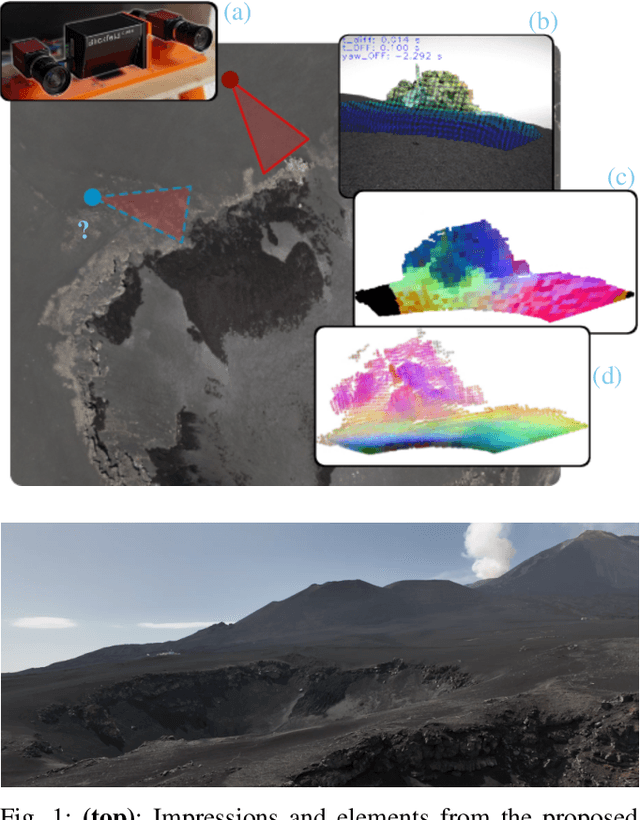
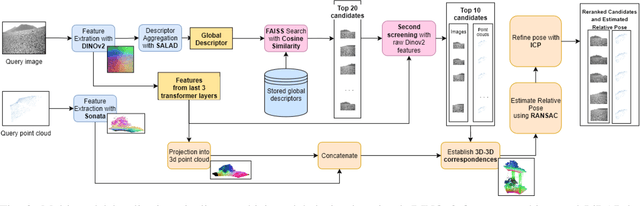
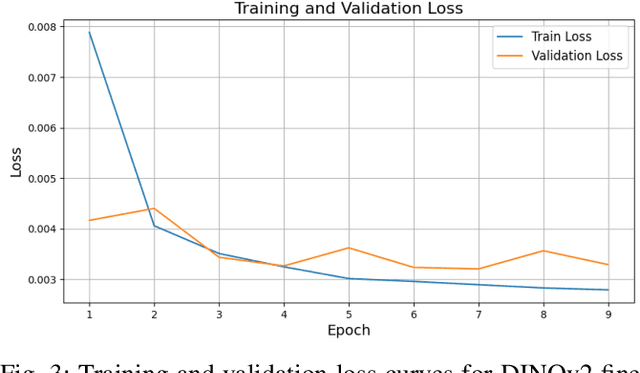
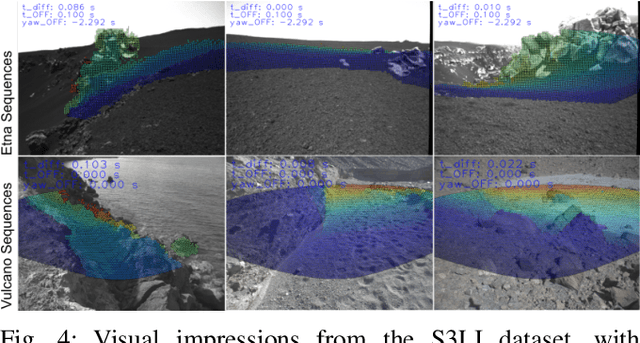
Robust loop closure detection is a critical component of Simultaneous Localization and Mapping (SLAM) algorithms in GNSS-denied environments, such as in the context of planetary exploration. In these settings, visual place recognition often fails due to aliasing and weak textures, while LiDAR-based methods suffer from sparsity and ambiguity. This paper presents MPRF, a multimodal pipeline that leverages transformer-based foundation models for both vision and LiDAR modalities to achieve robust loop closure in severely unstructured environments. Unlike prior work limited to retrieval, MPRF integrates a two-stage visual retrieval strategy with explicit 6-DoF pose estimation, combining DINOv2 features with SALAD aggregation for efficient candidate screening and SONATA-based LiDAR descriptors for geometric verification. Experiments on the S3LI dataset and S3LI Vulcano dataset show that MPRF outperforms state-of-the-art retrieval methods in precision while enhancing pose estimation robustness in low-texture regions. By providing interpretable correspondences suitable for SLAM back-ends, MPRF achieves a favorable trade-off between accuracy, efficiency, and reliability, demonstrating the potential of foundation models to unify place recognition and pose estimation. Code and models will be released at github.com/DLR-RM/MPRF.
Relative Navigation and Dynamic Target Tracking for Autonomous Underwater Proximity Operations
Aug 23, 2025Estimating a target's 6-DoF motion in underwater proximity operations is difficult because the chaser lacks target-side proprioception and the available relative observations are sparse, noisy, and often partial (e.g., Ultra-Short Baseline (USBL) positions). Without a motion prior, factor-graph maximum a posteriori estimation is underconstrained: consecutive target states are weakly linked and orientation can drift. We propose a generalized constant-twist motion prior defined on the tangent space of Lie groups that enforces temporally consistent trajectories across all degrees of freedom; in SE(3) it couples translation and rotation in the body frame. We present a ternary factor and derive its closed-form Jacobians based on standard Lie group operations, enabling drop-in use for trajectories on arbitrary Lie groups. We evaluate two deployment modes: (A) an SE(3)-only representation that regularizes orientation even when only position is measured, and (B) a mode with boundary factors that switches the target representation between SE(3) and 3D position while applying the same generalized constant-twist prior across representation changes. Validation on a real-world dynamic docking scenario dataset shows consistent ego-target trajectory estimation through USBL-only and optical relative measurement segments with an improved relative tracking accuracy compared to the noisy measurements to the target. Because the construction relies on standard Lie group primitives, it is portable across state manifolds and sensing modalities.
SMaRCSim: Maritime Robotics Simulation Modules
Jun 09, 2025Developing new functionality for underwater robots and testing them in the real world is time-consuming and resource-intensive. Simulation environments allow for rapid testing before field deployment. However, existing tools lack certain functionality for use cases in our project: i) developing learning-based methods for underwater vehicles; ii) creating teams of autonomous underwater, surface, and aerial vehicles; iii) integrating the simulation with mission planning for field experiments. A holistic solution to these problems presents great potential for bringing novel functionality into the underwater domain. In this paper we present SMaRCSim, a set of simulation packages that we have developed to help us address these issues.
Efficient Non-Myopic Layered Bayesian Optimization For Large-Scale Bathymetric Informative Path Planning
Oct 21, 2024



Informative path planning (IPP) applied to bathymetric mapping allows AUVs to focus on feature-rich areas to quickly reduce uncertainty and increase mapping efficiency. Existing methods based on Bayesian optimization (BO) over Gaussian Process (GP) maps work well on small scenarios but they are short-sighted and computationally heavy when mapping larger areas, hindering deployment in real applications. To overcome this, we present a 2-layered BO IPP method that performs non-myopic, real-time planning in a tree search fashion over large Stochastic Variational GP maps, while respecting the AUV motion constraints and accounting for localization uncertainty. Our framework outperforms the standard industrial lawn-mowing pattern and a myopic baseline in a set of hardware in the loop (HIL) experiments in an embedded platform over real bathymetry.
Hard Cases Detection in Motion Prediction by Vision-Language Foundation Models
May 31, 2024
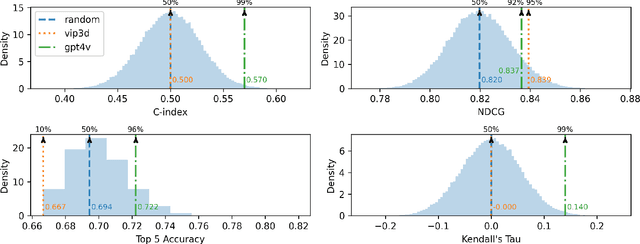

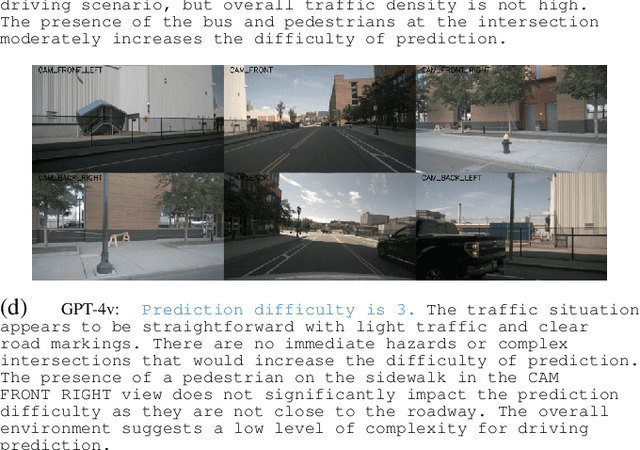
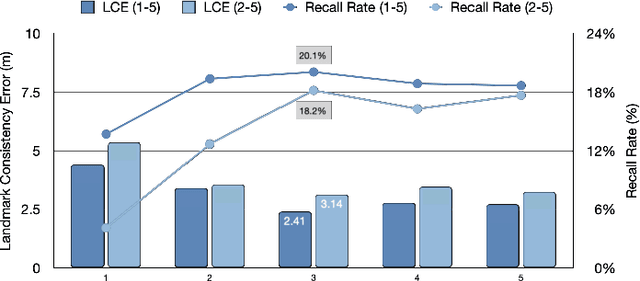
Addressing hard cases in autonomous driving, such as anomalous road users, extreme weather conditions, and complex traffic interactions, presents significant challenges. To ensure safety, it is crucial to detect and manage these scenarios effectively for autonomous driving systems. However, the rarity and high-risk nature of these cases demand extensive, diverse datasets for training robust models. Vision-Language Foundation Models (VLMs) have shown remarkable zero-shot capabilities as being trained on extensive datasets. This work explores the potential of VLMs in detecting hard cases in autonomous driving. We demonstrate the capability of VLMs such as GPT-4v in detecting hard cases in traffic participant motion prediction on both agent and scenario levels. We introduce a feasible pipeline where VLMs, fed with sequential image frames with designed prompts, effectively identify challenging agents or scenarios, which are verified by existing prediction models. Moreover, by taking advantage of this detection of hard cases by VLMs, we further improve the training efficiency of the existing motion prediction pipeline by performing data selection for the training samples suggested by GPT. We show the effectiveness and feasibility of our pipeline incorporating VLMs with state-of-the-art methods on NuScenes datasets. The code is accessible at https://github.com/KTH-RPL/Detect_VLM.
Benchmarking Classical and Learning-Based Multibeam Point Cloud Registration
May 10, 2024Deep learning has shown promising results for multiple 3D point cloud registration datasets. However, in the underwater domain, most registration of multibeam echo-sounder (MBES) point cloud data are still performed using classical methods in the iterative closest point (ICP) family. In this work, we curate and release DotsonEast Dataset, a semi-synthetic MBES registration dataset constructed from an autonomous underwater vehicle in West Antarctica. Using this dataset, we systematically benchmark the performance of 2 classical and 4 learning-based methods. The experimental results show that the learning-based methods work well for coarse alignment, and are better at recovering rough transforms consistently at high overlap (20-50%). In comparison, GICP (a variant of ICP) performs well for fine alignment and is better across all metrics at extremely low overlap (10%). To the best of our knowledge, this is the first work to benchmark both learning-based and classical registration methods on an AUV-based MBES dataset. To facilitate future research, both the code and data are made available online.
NeuRSS: Enhancing AUV Localization and Bathymetric Mapping with Neural Rendering for Sidescan SLAM
May 09, 2024Implicit neural representations and neural rendering have gained increasing attention for bathymetry estimation from sidescan sonar (SSS). These methods incorporate multiple observations of the same place from SSS data to constrain the elevation estimate, converging to a globally-consistent bathymetric model. However, the quality and precision of the bathymetric estimate are limited by the positioning accuracy of the autonomous underwater vehicle (AUV) equipped with the sonar. The global positioning estimate of the AUV relying on dead reckoning (DR) has an unbounded error due to the absence of a geo-reference system like GPS underwater. To address this challenge, we propose in this letter a modern and scalable framework, NeuRSS, for SSS SLAM based on DR and loop closures (LCs) over large timescales, with an elevation prior provided by the bathymetric estimate using neural rendering from SSS. This framework is an iterative procedure that improves localization and bathymetric mapping. Initially, the bathymetry estimated from SSS using the DR estimate, though crude, can provide an important elevation prior in the nonlinear least-squares (NLS) optimization that estimates the relative pose between two loop-closure vertices in a pose graph. Subsequently, the global pose estimate from the SLAM component improves the positioning estimate of the vehicle, thus improving the bathymetry estimation. We validate our localization and mapping approach on two large surveys collected with a surface vessel and an AUV, respectively. We evaluate their localization results against the ground truth and compare the bathymetry estimation against data collected with multibeam echo sounders (MBES).
Bathymetric Surveying with Imaging Sonar Using Neural Volume Rendering
Apr 23, 2024This research addresses the challenge of estimating bathymetry from imaging sonars where the state-of-the-art works have primarily relied on either supervised learning with ground-truth labels or surface rendering based on the Lambertian assumption. In this letter, we propose a novel, self-supervised framework based on volume rendering for reconstructing bathymetry using forward-looking sonar (FLS) data collected during standard surveys. We represent the seafloor as a neural heightmap encapsulated with a parametric multi-resolution hash encoding scheme and model the sonar measurements with a differentiable renderer using sonar volumetric rendering employed with hierarchical sampling techniques. Additionally, we model the horizontal and vertical beam patterns and estimate them jointly with the bathymetry. We evaluate the proposed method quantitatively on simulation and field data collected by remotely operated vehicles (ROVs) during low-altitude surveys. Results show that the proposed method outperforms the current state-of-the-art approaches that use imaging sonars for seabed mapping. We also demonstrate that the proposed approach can potentially be used to increase the resolution of a low-resolution prior map with FLS data from low-altitude surveys.
A Dense Subframe-based SLAM Framework with Side-scan Sonar
Dec 21, 2023


Side-scan sonar (SSS) is a lightweight acoustic sensor that is commonly deployed on autonomous underwater vehicles (AUVs) to provide high-resolution seafloor images. However, leveraging side-scan images for simultaneous localization and mapping (SLAM) presents a notable challenge, primarily due to the difficulty of establishing sufficient amount of accurate correspondences between these images. To address this, we introduce a novel subframe-based dense SLAM framework utilizing side-scan sonar data, enabling effective dense matching in overlapping regions of paired side-scan images. With each image being evenly divided into subframes, we propose a robust estimation pipeline to estimate the relative pose between each paired subframes, by using a good inlier set identified from dense correspondences. These relative poses are then integrated as edge constraints in a factor graph to optimize the AUV pose trajectory. The proposed framework is evaluated on three real datasets collected by a Hugin AUV. Among one of them includes manually-annotated keypoint correspondences as ground truth and is used for evaluation of pose trajectory. We also present a feasible way of evaluating mapping quality against multi-beam echosounder (MBES) data without the influence of pose. Experimental results demonstrate that our approach effectively mitigates drift from the dead-reckoning (DR) system and enables quasi-dense bathymetry reconstruction. An open-source implementation of this work is available.