 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMarinarium: a New Arena to Bring Maritime Robotics Closer to Shore
Feb 26, 2026This paper presents the Marinarium, a modular and stand-alone underwater research facility designed to provide a realistic testbed for maritime and space-analog robotic experimentation in a resource-efficient manner. The Marinarium combines a fully instrumented underwater and aerial operational volume, extendable via a retractable roof for real-weather conditions, a digital twin in the SMaRCSim simulator and tight integration with a space robotics laboratory. All of these result from design choices aimed at bridging simulation, laboratory validation, and field conditions. We compare the Marinarium to similar existing infrastructures and illustrate how its design enables a set of experiments in four open research areas within field robotics. First, we exploit high-fidelity dynamics data from the tank to demonstrate the potential of learning-based system identification approaches applied to underwater vehicles. We further highlight the versatility of the multi-domain operating volume via a rendezvous mission with a heterogeneous fleet of robots across underwater, surface, and air. We then illustrate how the presented digital twin can be utilized to reduce the reality gap in underwater simulation. Finally, we demonstrate the potential of underwater surrogates for spacecraft navigation validation by executing spatiotemporally identical inspection tasks on a planar space-robot emulator and a neutrally buoyant \gls{rov}. In this work, by sharing the insights obtained and rationale behind the design and construction of the Marinarium, we hope to provide the field robotics research community with a blueprint for bridging the gap between controlled and real offshore and space robotics experimentation.
Efficient Non-Myopic Layered Bayesian Optimization For Large-Scale Bathymetric Informative Path Planning
Oct 21, 2024



Informative path planning (IPP) applied to bathymetric mapping allows AUVs to focus on feature-rich areas to quickly reduce uncertainty and increase mapping efficiency. Existing methods based on Bayesian optimization (BO) over Gaussian Process (GP) maps work well on small scenarios but they are short-sighted and computationally heavy when mapping larger areas, hindering deployment in real applications. To overcome this, we present a 2-layered BO IPP method that performs non-myopic, real-time planning in a tree search fashion over large Stochastic Variational GP maps, while respecting the AUV motion constraints and accounting for localization uncertainty. Our framework outperforms the standard industrial lawn-mowing pattern and a myopic baseline in a set of hardware in the loop (HIL) experiments in an embedded platform over real bathymetry.
Online Stochastic Variational Gaussian Process Mapping for Large-Scale SLAM in Real Time
Nov 10, 2022



Autonomous underwater vehicles (AUVs) are becoming standard tools for underwater exploration and seabed mapping in both scientific and industrial applications \cite{graham2022rapid, stenius2022system}. Their capacity to dive untethered allows them to reach areas inaccessible to surface vessels and to collect data more closely to the seafloor, regardless of the water depth. However, their navigation autonomy remains bounded by the accuracy of their dead reckoning (DR) estimate of their global position, severely limited in the absence of a priori maps of the area and GPS signal. Global localization systems equivalent to the later exists for the underwater domain, such as LBL or USBL. However they involve expensive external infrastructure and their reliability decreases with the distance to the AUV, making them unsuitable for deep sea surveys.
Data-driven Loop Closure Detection in Bathymetric Point Clouds for Underwater SLAM
Sep 18, 2022
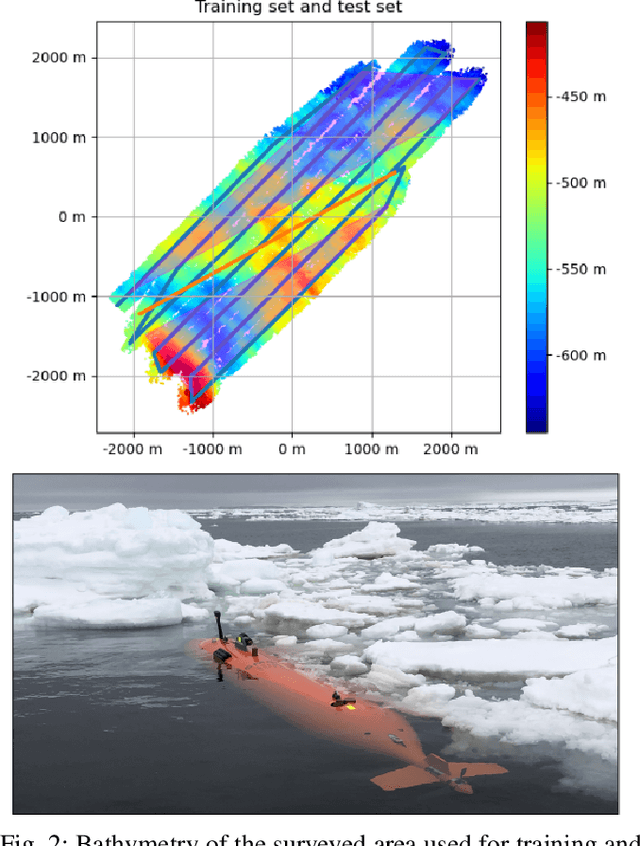

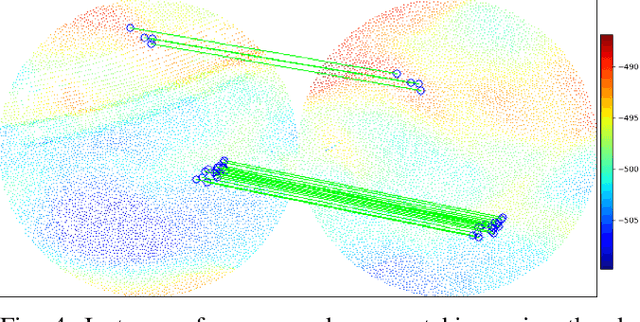
Simultaneous localization and mapping (SLAM) frameworks for autonomous navigation rely on robust data association to identify loop closures for back-end trajectory optimization. In the case of autonomous underwater vehicles (AUVs) equipped with multibeam echosounders (MBES), data association is particularly challenging due to the scarcity of identifiable landmarks in the seabed, the large drift in dead-reckoning navigation estimates to which AUVs are prone and the low resolution characteristic of MBES data. Deep learning solutions to loop closure detection have shown excellent performance on data from more structured environments. However, their transfer to the seabed domain is not immediate and efforts to port them are hindered by the lack of bathymetric datasets. Thus, in this paper we propose a neural network architecture aimed to showcase the potential of adapting such techniques to correspondence matching in bathymetric data. We train our framework on real bathymetry from an AUV mission and evaluate its performance on the tasks of loop closure detection and coarse point cloud alignment. Finally, we show its potential against a more traditional method and release both its implementation and the dataset used.
Fully-probabilistic Terrain Modelling with Stochastic Variational Gaussian Process Maps
Mar 21, 2022
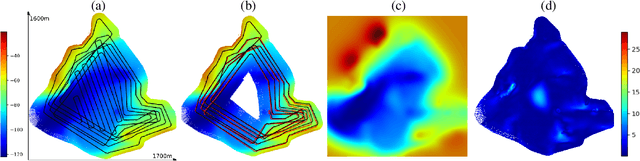
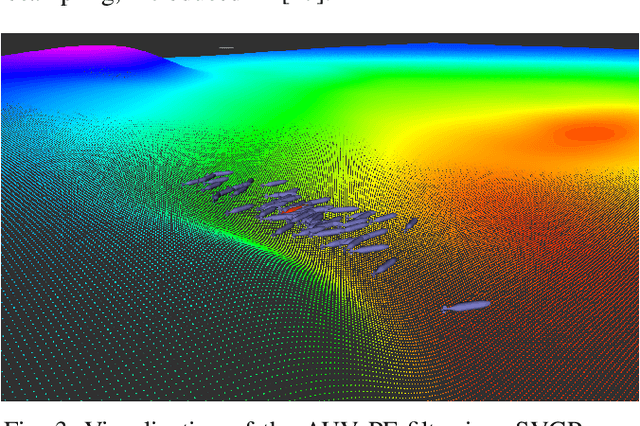
Gaussian processes (GPs) are becoming a standard tool to build terrain representations thanks to their capacity to model map uncertainty. This effectively yields a reliability measure of the areas of the map, which can be directly utilized by Bayes filtering algorithms in robot localization problems. A key insight is that this uncertainty can incorporate the noise intrinsic to the terrain surveying process through the GPs ability to train on uncertain inputs (UIs). However, existing techniques to build GP maps with UIs in a tractable manner are restricted in the form and degree of the input noise. In this letter, we propose a flexible and efficient framework to build large-scale GP maps with UIs based on Stochastic Variational GPs and Monte Carlo sampling of the UIs distributions. We validate our mapping approach on a large bathymetric survey collected with an AUV and analyze its performance against the use of deterministic inputs (DI). Finally, we show how using UI SVGP maps yields more accurate particle filter localization results than DI SVGP on a real AUV mission over an entirely predicted area.
PointNetKL: Deep Inference for GICP Covariance Estimation in Bathymetric SLAM
Mar 24, 2020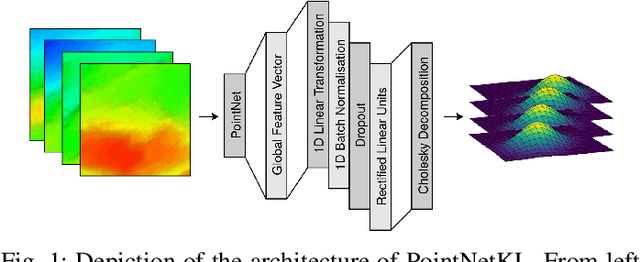

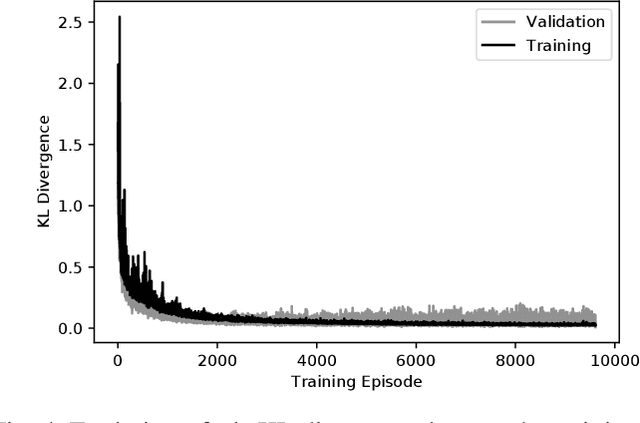
Registration methods for point clouds have become a key component of many SLAM systems on autonomous vehicles. However, an accurate estimate of the uncertainty of such registration is a key requirement to a consistent fusion of this kind of measurements in a SLAM filter. This estimate, which is normally given as a covariance in the transformation computed between point cloud reference frames, has been modelled following different approaches, among which the most accurate is considered to be the Monte Carlo method. However, a Monte Carlo approximation is cumbersome to use inside a time-critical application such as online SLAM. Efforts have been made to estimate this covariance via machine learning using carefully designed features to abstract the raw point clouds. However, the performance of this approach is sensitive to the features chosen. We argue that it is possible to learn the features along with the covariance by working with the raw data and thus we propose a new approach based on PointNet. In this work, we train this network using the KL divergence between the learned uncertainty distribution and one computed by the Monte Carlo method as the loss. We test the performance of the general model presented applying it to our target use-case of SLAM with an autonomous underwater vehicle (AUV) restricted to the 2-dimensional registration of 3D bathymetric point clouds.