 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge6D Pose Estimation with Combined Deep Learning and 3D Vision Techniques for a Fast and Accurate Object Grasping
Nov 11, 2021
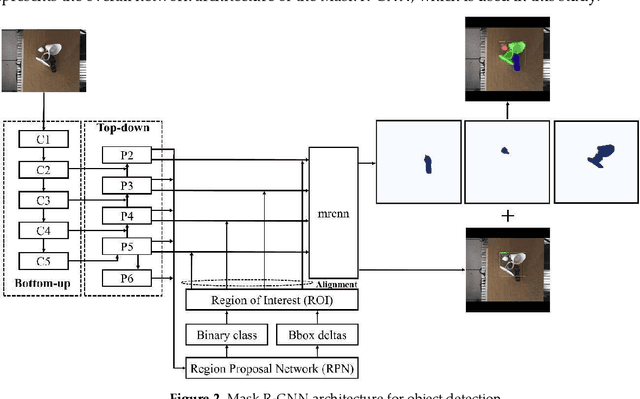
Real-time robotic grasping, supporting a subsequent precise object-in-hand operation task, is a priority target towards highly advanced autonomous systems. However, such an algorithm which can perform sufficiently-accurate grasping with time efficiency is yet to be found. This paper proposes a novel method with a 2-stage approach that combines a fast 2D object recognition using a deep neural network and a subsequent accurate and fast 6D pose estimation based on Point Pair Feature framework to form a real-time 3D object recognition and grasping solution capable of multi-object class scenes. The proposed solution has a potential to perform robustly on real-time applications, requiring both efficiency and accuracy. In order to validate our method, we conducted extensive and thorough experiments involving laborious preparation of our own dataset. The experiment results show that the proposed method scores 97.37% accuracy in 5cm5deg metric and 99.37% in Average Distance metric. Experiment results have shown an overall 62% relative improvement (5cm5deg metric) and 52.48% (Average Distance metric) by using the proposed method. Moreover, the pose estimation execution also showed an average improvement of 47.6% in running time. Finally, to illustrate the overall efficiency of the system in real-time operations, a pick-and-place robotic experiment is conducted and has shown a convincing success rate with 90% of accuracy. This experiment video is available at https://sites.google.com/view/dl-ppf6dpose/.
BOP: Benchmark for 6D Object Pose Estimation
Aug 24, 2018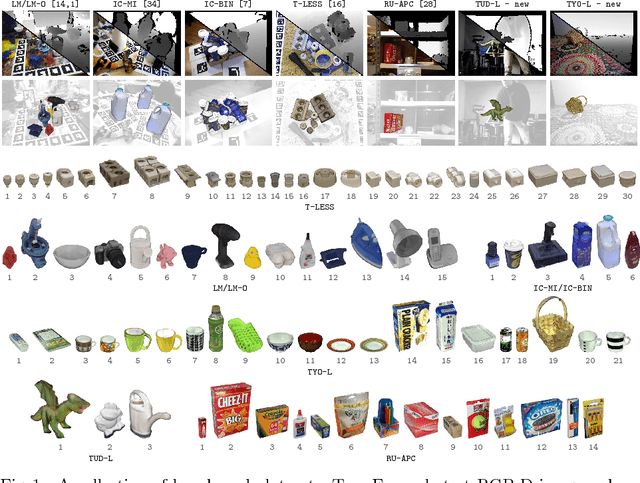
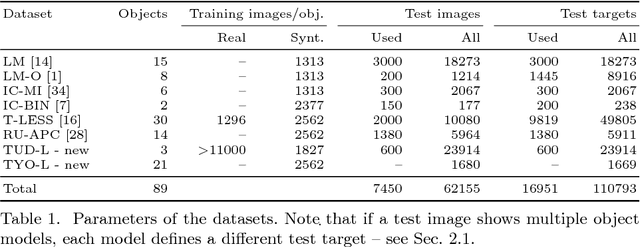

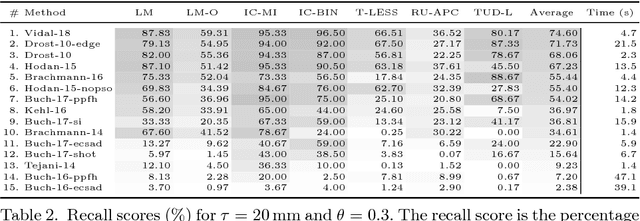
We propose a benchmark for 6D pose estimation of a rigid object from a single RGB-D input image. The training data consists of a texture-mapped 3D object model or images of the object in known 6D poses. The benchmark comprises of: i) eight datasets in a unified format that cover different practical scenarios, including two new datasets focusing on varying lighting conditions, ii) an evaluation methodology with a pose-error function that deals with pose ambiguities, iii) a comprehensive evaluation of 15 diverse recent methods that captures the status quo of the field, and iv) an online evaluation system that is open for continuous submission of new results. The evaluation shows that methods based on point-pair features currently perform best, outperforming template matching methods, learning-based methods and methods based on 3D local features. The project website is available at bop.felk.cvut.cz.
6D Pose Estimation using an Improved Method based on Point Pair Features
Feb 23, 2018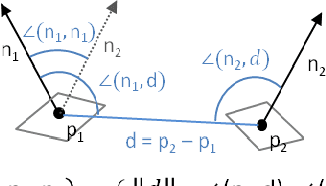
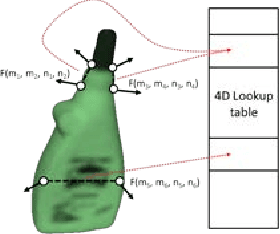


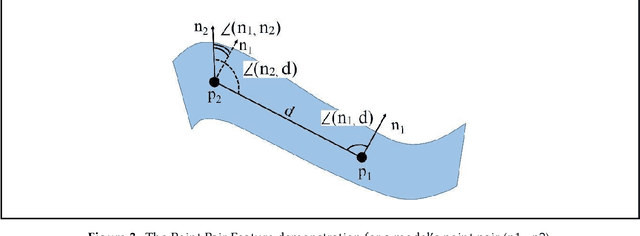
The Point Pair Feature (Drost et al. 2010) has been one of the most successful 6D pose estimation method among model-based approaches as an efficient, integrated and compromise alternative to the traditional local and global pipelines. During the last years, several variations of the algorithm have been proposed. Among these extensions, the solution introduced by Hinterstoisser et al. (2016) is a major contribution. This work presents a variation of this PPF method applied to the SIXD Challenge datasets presented at the 3rd International Workshop on Recovering 6D Object Pose held at the ICCV 2017. We report an average recall of 0.77 for all datasets and overall recall of 0.82, 0.67, 0.85, 0.37, 0.97 and 0.96 for hinterstoisser, tless, tudlight, rutgers, tejani and doumanoglou datasets, respectively.