 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGPU-accelerated image alignment for object detection in industrial applications
Dec 10, 2021
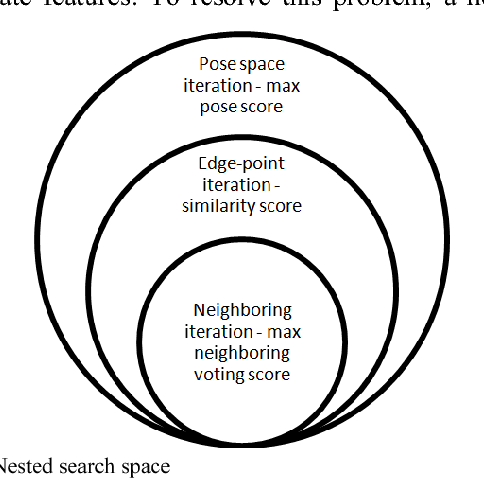
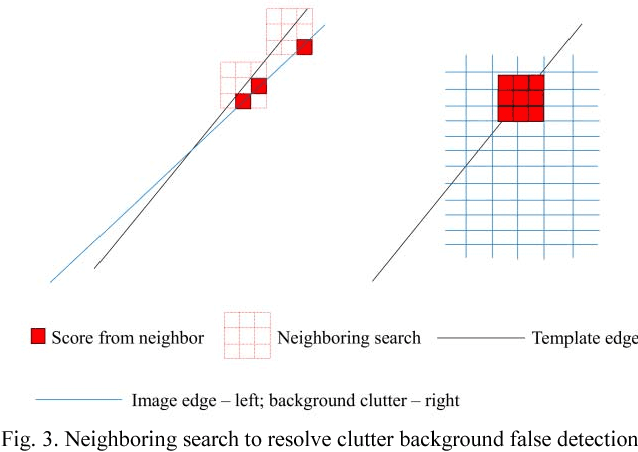
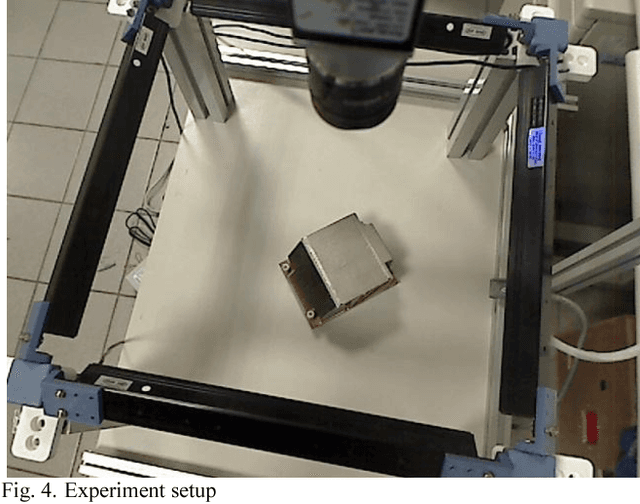
This research proposes a practical method for detecting featureless objects by using image alignment approach with a robust similarity measure in industrial applications. This similarity measure is robust against occlusion, illumination changes and background clutter. The performance of the proposed GPU (Graphics Processing Unit) accelerated algorithm is deemed successful in experiments of comparison between both CPU and GPU implementations
6D Pose Estimation with Combined Deep Learning and 3D Vision Techniques for a Fast and Accurate Object Grasping
Nov 11, 2021
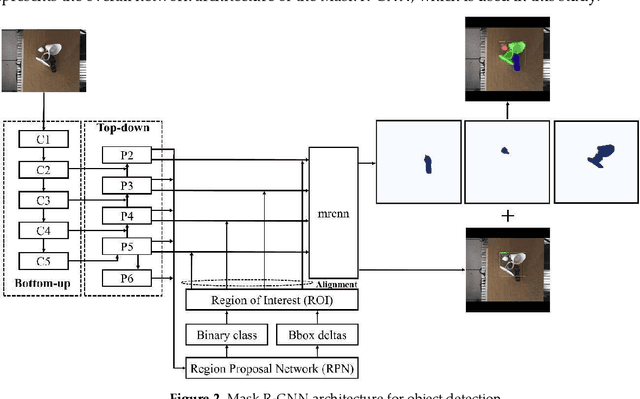
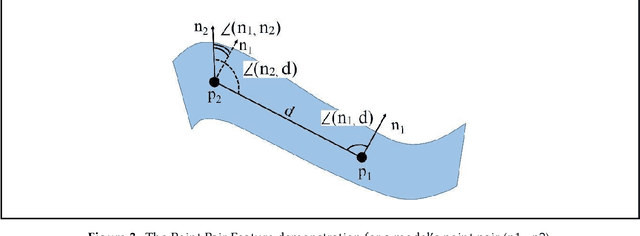
Real-time robotic grasping, supporting a subsequent precise object-in-hand operation task, is a priority target towards highly advanced autonomous systems. However, such an algorithm which can perform sufficiently-accurate grasping with time efficiency is yet to be found. This paper proposes a novel method with a 2-stage approach that combines a fast 2D object recognition using a deep neural network and a subsequent accurate and fast 6D pose estimation based on Point Pair Feature framework to form a real-time 3D object recognition and grasping solution capable of multi-object class scenes. The proposed solution has a potential to perform robustly on real-time applications, requiring both efficiency and accuracy. In order to validate our method, we conducted extensive and thorough experiments involving laborious preparation of our own dataset. The experiment results show that the proposed method scores 97.37% accuracy in 5cm5deg metric and 99.37% in Average Distance metric. Experiment results have shown an overall 62% relative improvement (5cm5deg metric) and 52.48% (Average Distance metric) by using the proposed method. Moreover, the pose estimation execution also showed an average improvement of 47.6% in running time. Finally, to illustrate the overall efficiency of the system in real-time operations, a pick-and-place robotic experiment is conducted and has shown a convincing success rate with 90% of accuracy. This experiment video is available at https://sites.google.com/view/dl-ppf6dpose/.