 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLIMOncello: Iterated Error-State Kalman Filter on the SGal(3) Manifold for Fast LiDAR-Inertial Odometry
Jan 05, 2026

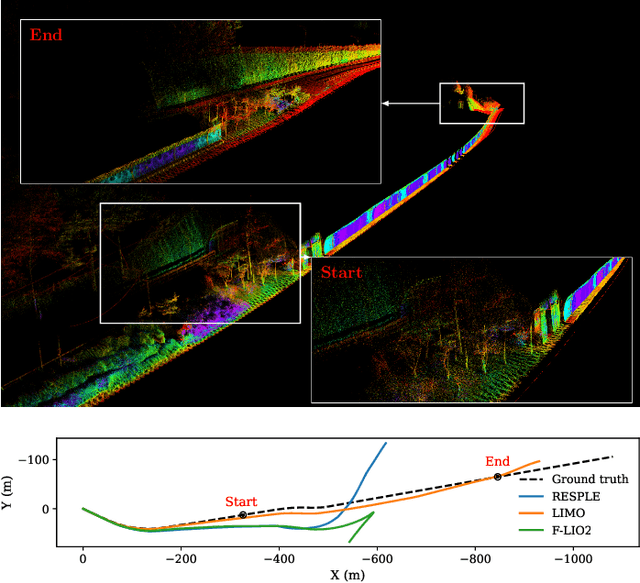

This work introduces LIMOncello, a tightly coupled LiDAR-Inertial Odometry system that models 6-DoF motion on the $\mathrm{SGal}(3)$ manifold within an iterated error-state Kalman filter backend. Compared to state representations defined on $\mathrm{SO}(3)\times\mathbb{R}^6$, the use of $\mathrm{SGal}(3)$ provides a coherent and numerically stable discrete-time propagation model that helps limit drift in low-observability conditions. LIMOncello also includes a lightweight incremental i-Octree mapping backend that enables faster updates and substantially lower memory usage than incremental kd-tree style map structures, without relying on locality-restricted search heuristics. Experiments on multiple real-world datasets show that LIMOncello achieves competitive accuracy while improving robustness in geometrically sparse environments. The system maintains real-time performance with stable memory growth and is released as an extensible open-source implementation at https://github.com/CPerezRuiz335/LIMOncello.
LIMOncello: Revisited IKFoM on the SGal(3) Manifold for Fast LiDAR-Inertial Odometry
Dec 22, 2025This work introduces LIMOncello, a tightly coupled LiDAR-Inertial Odometry system that models 6-DoF motion on the $\mathrm{SGal}(3)$ manifold within an iterated error-state Kalman filter backend. Compared to state representations defined on $\mathrm{SO}(3)\times\mathbb{R}^6$, the use of $\mathrm{SGal}(3)$ provides a coherent and numerically stable discrete-time propagation model that helps limit drift in low-observability conditions. LIMOncello also includes a lightweight incremental i-Octree mapping backend that enables faster updates and substantially lower memory usage than incremental kd-tree style map structures, without relying on locality-restricted search heuristics. Experiments on multiple real-world datasets show that LIMOncello achieves competitive accuracy while improving robustness in geometrically sparse environments. The system maintains real-time performance with stable memory growth and is released as an extensible open-source implementation at https://github.com/CPerezRuiz335/LIMOncello.
Borinot: an open thrust-torque-controlled robot for research on agile aerial-contact motion
Jul 27, 2023



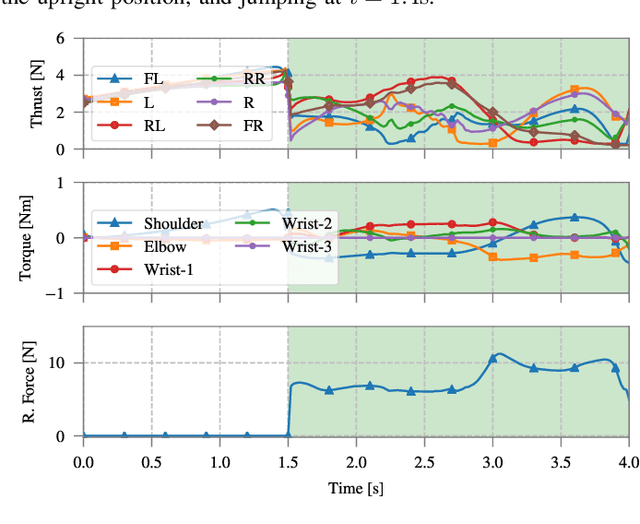
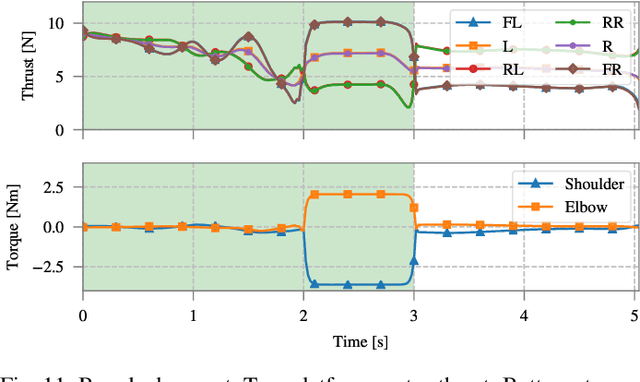
This paper introduces Borinot, an open-source aerial robotic platform designed to conduct research on hybrid agile locomotion and manipulation using flight and contacts. This platform features an agile and powerful hexarotor that can be outfitted with torque-actuated limbs of diverse architecture, allowing for whole-body dynamic control. As a result, Borinot can perform agile tasks such as aggressive or acrobatic maneuvers with the participation of the whole-body dynamics. The limbs attached to Borinot can be utilized in various ways; during contact, they can be used as legs to create contact-based locomotion, or as arms to manipulate objects. In free flight, they can be used as tails to contribute to dynamics, mimicking the movements of many animals. This allows for any hybridization of these dynamic modes, making Borinot an ideal open-source platform for research on hybrid aerial-contact agile motion. To demonstrate the key capabilities of Borinot in terms of agility with hybrid motion modes, we have fitted a planar 2DoF limb and implemented a whole-body torque-level model-predictive-control. The result is a capable and adaptable platform that, we believe, opens up new avenues of research in the field of agile robotics. Interesting links\footnote{Documentation: \url{www.iri.upc.edu/borinot}}\footnote{Video: \url{https://youtu.be/Ob7IIVB6P_A}}.
Full-Body Torque-Level Non-linear Model Predictive Control for Aerial Manipulation
Jul 08, 2021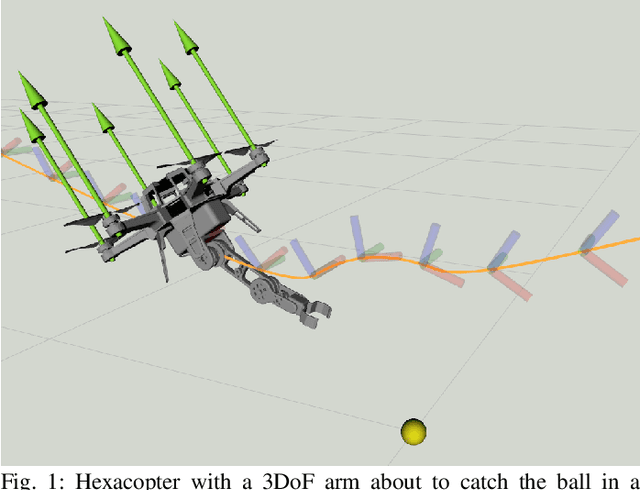
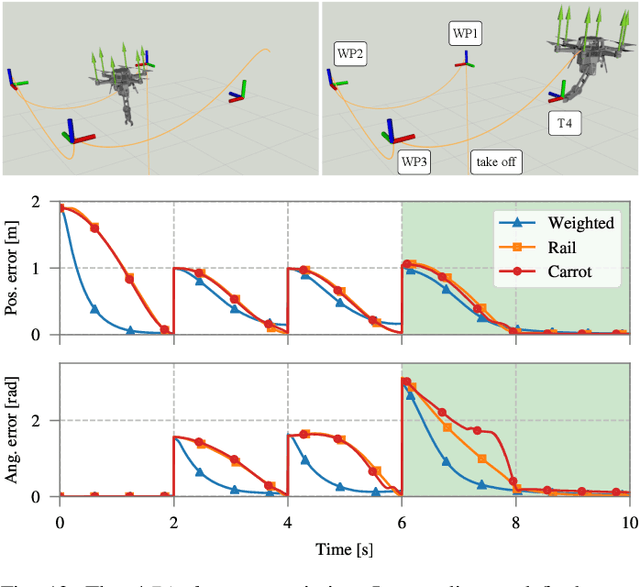
Non-linear model predictive control (nMPC) is a powerful approach to control complex robots (such as humanoids, quadrupeds, or unmanned aerial manipulators (UAMs)) as it brings important advantages over other existing techniques. The full-body dynamics, along with the prediction capability of the optimal control problem (OCP) solved at the core of the controller, allows to actuate the robot in line with its dynamics. This fact enhances the robot capabilities and allows, e.g., to perform intricate maneuvers at high dynamics while optimizing the amount of energy used. Despite the many similarities between humanoids or quadrupeds and UAMs, full-body torque-level nMPC has rarely been applied to UAMs. This paper provides a thorough description of how to use such techniques in the field of aerial manipulation. We give a detailed explanation of the different parts involved in the OCP, from the UAM dynamical model to the residuals in the cost function. We develop and compare three different nMPC controllers: Weighted MPC, Rail MPC, and Carrot MPC, which differ on the structure of their OCPs and on how these are updated at every time step. To validate the proposed framework, we present a wide variety of simulated case studies. First, we evaluate the trajectory generation problem, i.e., optimal control problems solved offline, involving different kinds of motions (e.g., aggressive maneuvers or contact locomotion) for different types of UAMs. Then, we assess the performance of the three nMPC controllers, i.e., closed-loop controllers solved online, through a variety of realistic simulations. For the benefit of the community, we have made available the source code related to this work.
High Speed Event Camera TRacking
Oct 13, 2020
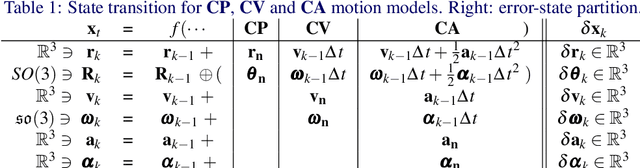

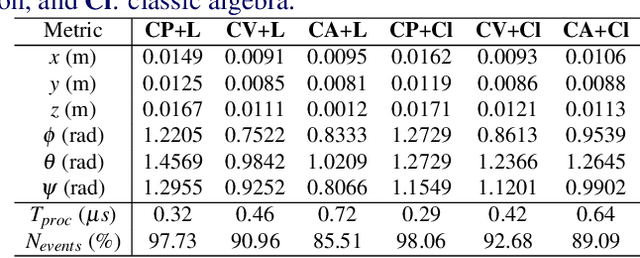
Event cameras are bioinspired sensors with reaction times in the order of microseconds. This property makes them appealing for use in highly-dynamic computer vision applications. In this work,we explore the limits of this sensing technology and present an ultra-fast tracking algorithm able to estimate six-degree-of-freedom motion with dynamics over 25.8 g, at a throughput of 10 kHz,processing over a million events per second. Our method is capable of tracking either camera motion or the motion of an object in front of it, using an error-state Kalman filter formulated in a Lie-theoretic sense. The method includes a robust mechanism for the matching of events with projected line segments with very fast outlier rejection. Meticulous treatment of sparse matrices is applied to achieve real-time performance. Different motion models of varying complexity are considered for the sake of comparison and performance analysis
A micro Lie theory for state estimation in robotics
Feb 06, 2019
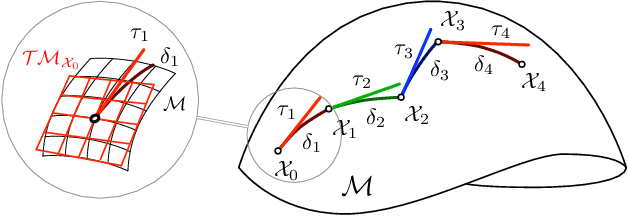

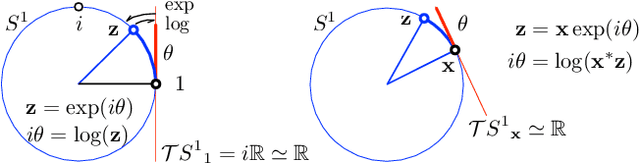
A Lie group is an old mathematical abstract object dating back to the XIX century, when mathematician Sophus Lie laid the foundations of the theory of continuous transformation groups. As it often happens, its usage has spread over diverse areas of science and technology many years later. In robotics, we are recently experiencing an important trend in its usage, at least in the fields of estimation, and particularly in motion estimation for navigation. Yet for a vast majority of roboticians, Lie groups are highly abstract constructions and therefore difficult to understand and to use. This may be due to the fact that most of the literature on Lie theory is written by and for mathematicians and physicists, who might be more used than us to the deep abstractions this theory deals with. In estimation for robotics it is often not necessary to exploit the full capacity of the theory, and therefore an effort of selection of materials is required. In this paper, we will walk through the most basic principles of the Lie theory, with the aim of conveying clear and useful ideas, and leave a significant corpus of the Lie theory behind. Even with this mutilation, the material included here has proven to be extremely useful in modern estimation algorithms for robotics, especially in the fields of SLAM, visual odometry, and the like. Alongside this micro Lie theory, we provide a chapter with a few application examples, and a vast reference of formulas for the major Lie groups used in robotics, including most jacobian matrices and the way to easily manipulate them. We also present a new C++ template-only library implementing all the functionality described here.
Deconvolutional Networks for Point-Cloud Vehicle Detection and Tracking in Driving Scenarios
Aug 23, 2018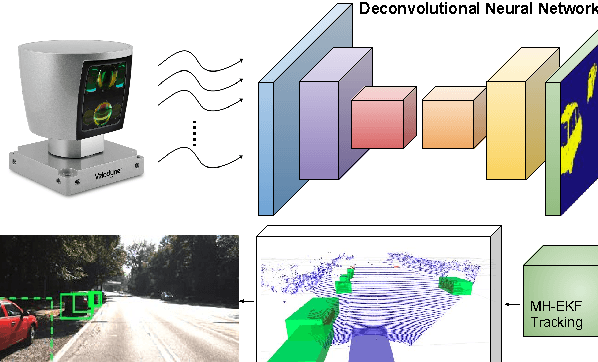
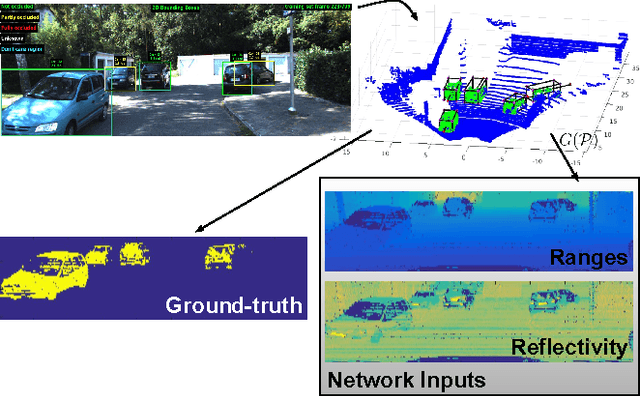
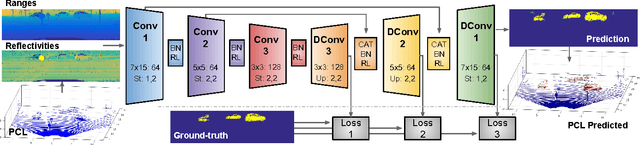
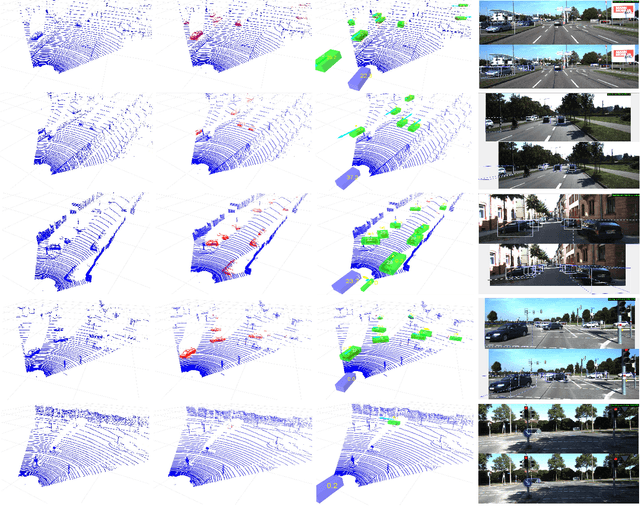
Vehicle detection and tracking is a core ingredient for developing autonomous driving applications in urban scenarios. Recent image-based Deep Learning (DL) techniques are obtaining breakthrough results in these perceptive tasks. However, DL research has not yet advanced much towards processing 3D point clouds from lidar range-finders. These sensors are very common in autonomous vehicles since, despite not providing as semantically rich information as images, their performance is more robust under harsh weather conditions than vision sensors. In this paper we present a full vehicle detection and tracking system that works with 3D lidar information only. Our detection step uses a Convolutional Neural Network (CNN) that receives as input a featured representation of the 3D information provided by a Velodyne HDL-64 sensor and returns a per-point classification of whether it belongs to a vehicle or not. The classified point cloud is then geometrically processed to generate observations for a multi-object tracking system implemented via a number of Multi-Hypothesis Extended Kalman Filters (MH-EKF) that estimate the position and velocity of the surrounding vehicles. The system is thoroughly evaluated on the KITTI tracking dataset, and we show the performance boost provided by our CNN-based vehicle detector over a standard geometric approach. Our lidar-based approach uses about a 4% of the data needed for an image-based detector with similarly competitive results.
Quaternion kinematics for the error-state Kalman filter
Nov 03, 2017
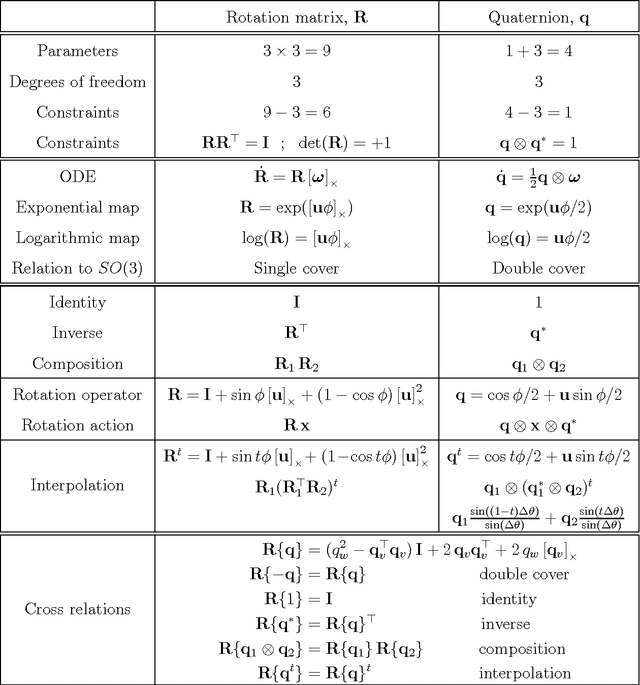

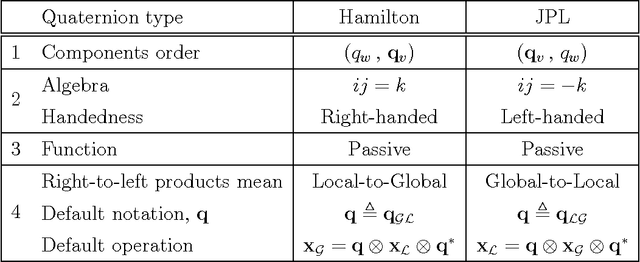
This article is an exhaustive revision of concepts and formulas related to quaternions and rotations in 3D space, and their proper use in estimation engines such as the error-state Kalman filter. The paper includes an in-depth study of the rotation group and its Lie structure, with formulations using both quaternions and rotation matrices. It makes special attention in the definition of rotation perturbations, derivatives and integrals. It provides numerous intuitions and geometrical interpretations to help the reader grasp the inner mechanisms of 3D rotation. The whole material is used to devise precise formulations for error-state Kalman filters suited for real applications using integration of signals from an inertial measurement unit (IMU).
RT-SLAM: A Generic and Real-Time Visual SLAM Implementation
Jan 26, 2012



This article presents a new open-source C++ implementation to solve the SLAM problem, which is focused on genericity, versatility and high execution speed. It is based on an original object oriented architecture, that allows the combination of numerous sensors and landmark types, and the integration of various approaches proposed in the literature. The system capacities are illustrated by the presentation of an inertial/vision SLAM approach, for which several improvements over existing methods have been introduced, and that copes with very high dynamic motions. Results with a hand-held camera are presented.
* 10 pages