 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBorinot: an open thrust-torque-controlled robot for research on agile aerial-contact motion
Jul 27, 2023



This paper introduces Borinot, an open-source aerial robotic platform designed to conduct research on hybrid agile locomotion and manipulation using flight and contacts. This platform features an agile and powerful hexarotor that can be outfitted with torque-actuated limbs of diverse architecture, allowing for whole-body dynamic control. As a result, Borinot can perform agile tasks such as aggressive or acrobatic maneuvers with the participation of the whole-body dynamics. The limbs attached to Borinot can be utilized in various ways; during contact, they can be used as legs to create contact-based locomotion, or as arms to manipulate objects. In free flight, they can be used as tails to contribute to dynamics, mimicking the movements of many animals. This allows for any hybridization of these dynamic modes, making Borinot an ideal open-source platform for research on hybrid aerial-contact agile motion. To demonstrate the key capabilities of Borinot in terms of agility with hybrid motion modes, we have fitted a planar 2DoF limb and implemented a whole-body torque-level model-predictive-control. The result is a capable and adaptable platform that, we believe, opens up new avenues of research in the field of agile robotics. Interesting links\footnote{Documentation: \url{www.iri.upc.edu/borinot}}\footnote{Video: \url{https://youtu.be/Ob7IIVB6P_A}}.
Full-Body Torque-Level Non-linear Model Predictive Control for Aerial Manipulation
Jul 08, 2021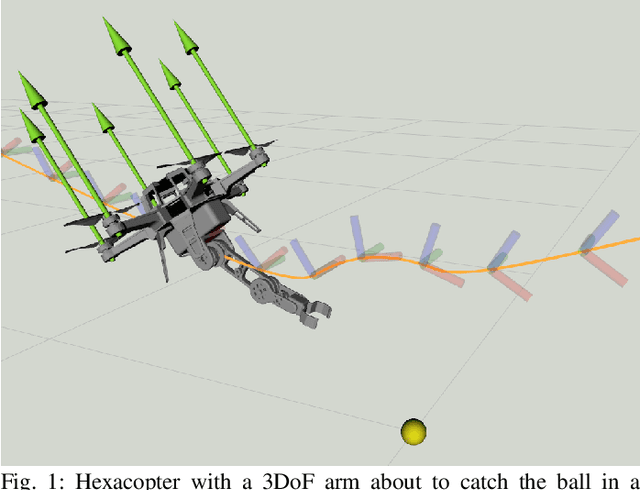
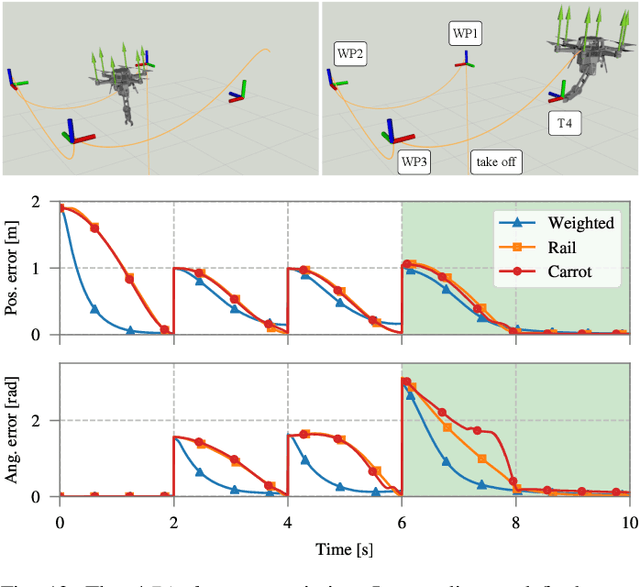
Non-linear model predictive control (nMPC) is a powerful approach to control complex robots (such as humanoids, quadrupeds, or unmanned aerial manipulators (UAMs)) as it brings important advantages over other existing techniques. The full-body dynamics, along with the prediction capability of the optimal control problem (OCP) solved at the core of the controller, allows to actuate the robot in line with its dynamics. This fact enhances the robot capabilities and allows, e.g., to perform intricate maneuvers at high dynamics while optimizing the amount of energy used. Despite the many similarities between humanoids or quadrupeds and UAMs, full-body torque-level nMPC has rarely been applied to UAMs. This paper provides a thorough description of how to use such techniques in the field of aerial manipulation. We give a detailed explanation of the different parts involved in the OCP, from the UAM dynamical model to the residuals in the cost function. We develop and compare three different nMPC controllers: Weighted MPC, Rail MPC, and Carrot MPC, which differ on the structure of their OCPs and on how these are updated at every time step. To validate the proposed framework, we present a wide variety of simulated case studies. First, we evaluate the trajectory generation problem, i.e., optimal control problems solved offline, involving different kinds of motions (e.g., aggressive maneuvers or contact locomotion) for different types of UAMs. Then, we assess the performance of the three nMPC controllers, i.e., closed-loop controllers solved online, through a variety of realistic simulations. For the benefit of the community, we have made available the source code related to this work.