 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAgile Interception of a Flying Target using Competitive Reinforcement Learning
Mar 17, 2026This article presents a solution to intercept an agile drone by another agile drone carrying a catching net. We formulate the interception as a Competitive Reinforcement Learning problem, where the interceptor and the target drone are controlled by separate policies trained with Proximal Policy Optimization (PPO). We introduce a high-fidelity simulation environment that integrates a realistic quadrotor dynamics model and a low-level control architecture implemented in JAX, which allows for fast parallelized execution on GPUs. We train the agents using low-level control, collective thrust and body rates, to achieve agile flights both for the interceptor and the target. We compare the performance of the trained policies in terms of catch rate, time to catch, and crash rate, against common heuristic baselines and show that our solution outperforms these baselines for interception of agile targets. Finally, we demonstrate the performance of the trained policies in a scaled real-world scenario using agile drones inside an indoor flight arena.
Deep Bayesian ICP Covariance Estimation
Feb 23, 2022

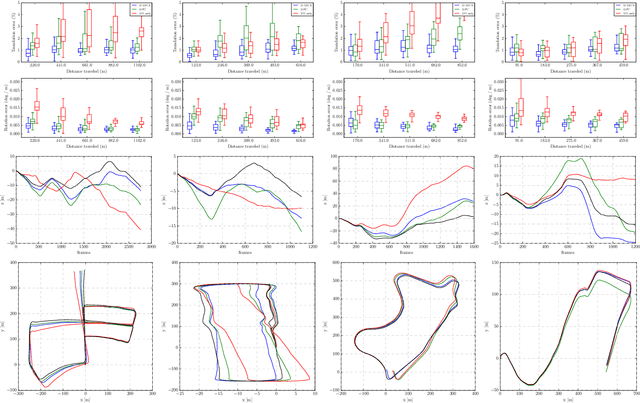
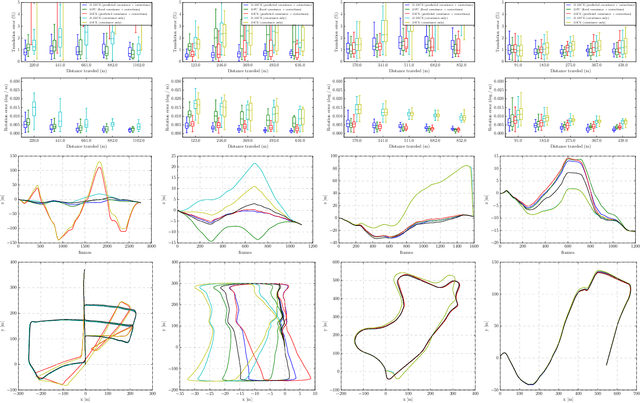
Covariance estimation for the Iterative Closest Point (ICP) point cloud registration algorithm is essential for state estimation and sensor fusion purposes. We argue that a major source of error for ICP is in the input data itself, from the sensor noise to the scene geometry. Benefiting from recent developments in deep learning for point clouds, we propose a data-driven approach to learn an error model for ICP. We estimate covariances modeling data-dependent heteroscedastic aleatoric uncertainty, and epistemic uncertainty using a variational Bayesian approach. The system evaluation is performed on LiDAR odometry on different datasets, highlighting good results in comparison to the state of the art.
Simultaneously Learning Corrections and Error Models for Geometry-based Visual Odometry Methods
Jul 29, 2020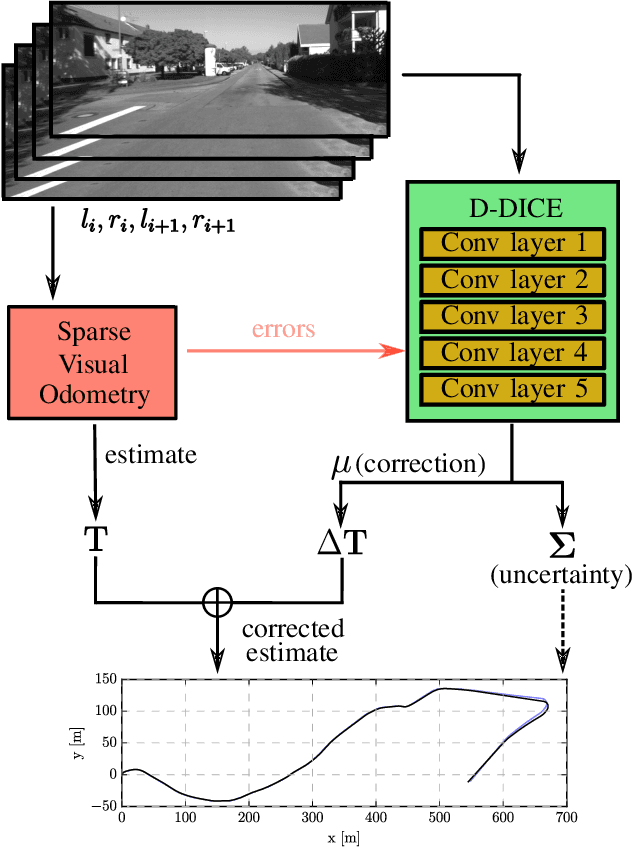
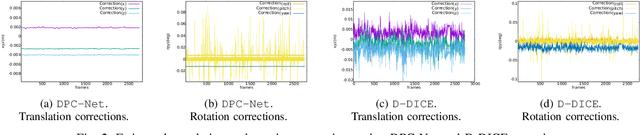
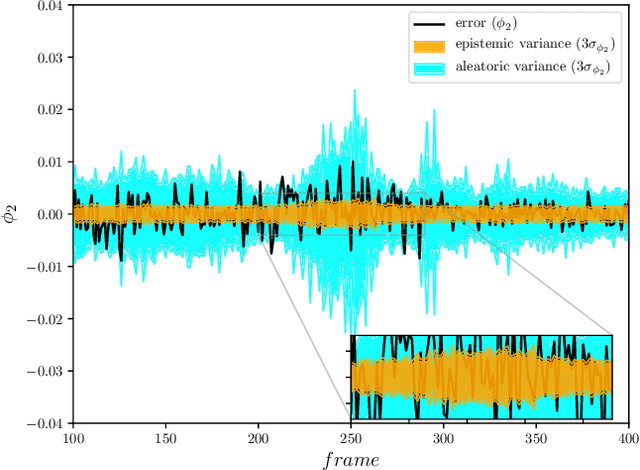
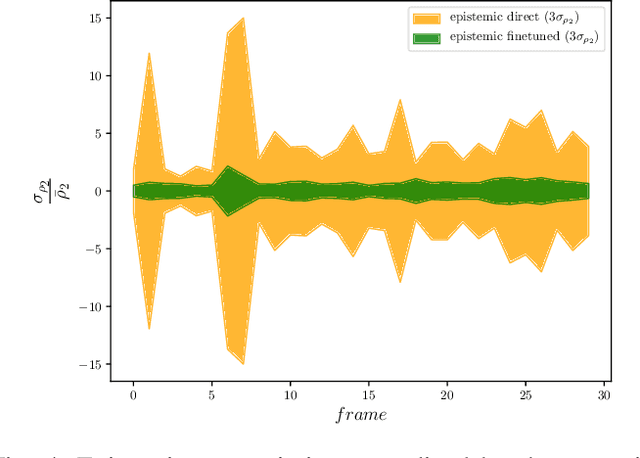
This paper fosters the idea that deep learning methods can be used to complement classical visual odometry pipelines to improve their accuracy and to associate uncertainty models to their estimations. We show that the biases inherent to the visual odometry process can be faithfully learned and compensated for, and that a learning architecture associated with a probabilistic loss function can jointly estimate a full covariance matrix of the residual errors, defining an error model capturing the heteroscedasticity of the process. Experiments on autonomous driving image sequences assess the possibility to concurrently improve visual odometry and estimate an error associated with its outputs.
RT-SLAM: A Generic and Real-Time Visual SLAM Implementation
Jan 26, 2012



This article presents a new open-source C++ implementation to solve the SLAM problem, which is focused on genericity, versatility and high execution speed. It is based on an original object oriented architecture, that allows the combination of numerous sensors and landmark types, and the integration of various approaches proposed in the literature. The system capacities are illustrated by the presentation of an inertial/vision SLAM approach, for which several improvements over existing methods have been introduced, and that copes with very high dynamic motions. Results with a hand-held camera are presented.
* 10 pages