Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Bayesian ICP Covariance Estimation
Paper and Code
Feb 23, 2022
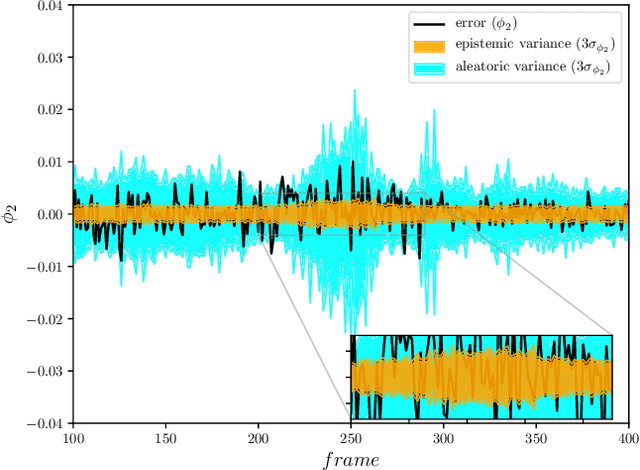

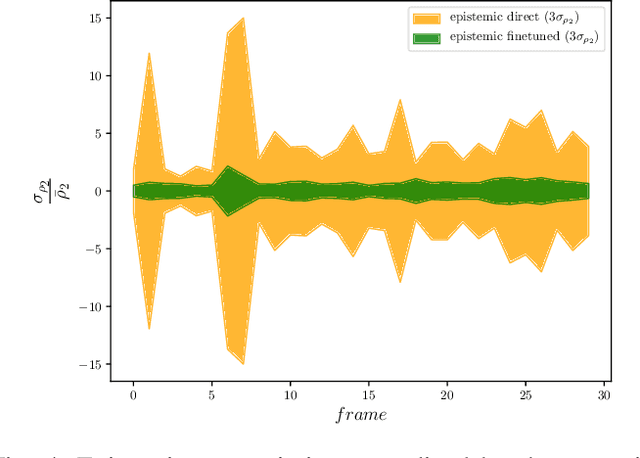
Covariance estimation for the Iterative Closest Point (ICP) point cloud registration algorithm is essential for state estimation and sensor fusion purposes. We argue that a major source of error for ICP is in the input data itself, from the sensor noise to the scene geometry. Benefiting from recent developments in deep learning for point clouds, we propose a data-driven approach to learn an error model for ICP. We estimate covariances modeling data-dependent heteroscedastic aleatoric uncertainty, and epistemic uncertainty using a variational Bayesian approach. The system evaluation is performed on LiDAR odometry on different datasets, highlighting good results in comparison to the state of the art.
View paper on