 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeep Bayesian ICP Covariance Estimation
Feb 23, 2022

Covariance estimation for the Iterative Closest Point (ICP) point cloud registration algorithm is essential for state estimation and sensor fusion purposes. We argue that a major source of error for ICP is in the input data itself, from the sensor noise to the scene geometry. Benefiting from recent developments in deep learning for point clouds, we propose a data-driven approach to learn an error model for ICP. We estimate covariances modeling data-dependent heteroscedastic aleatoric uncertainty, and epistemic uncertainty using a variational Bayesian approach. The system evaluation is performed on LiDAR odometry on different datasets, highlighting good results in comparison to the state of the art.
Simultaneously Learning Corrections and Error Models for Geometry-based Visual Odometry Methods
Jul 29, 2020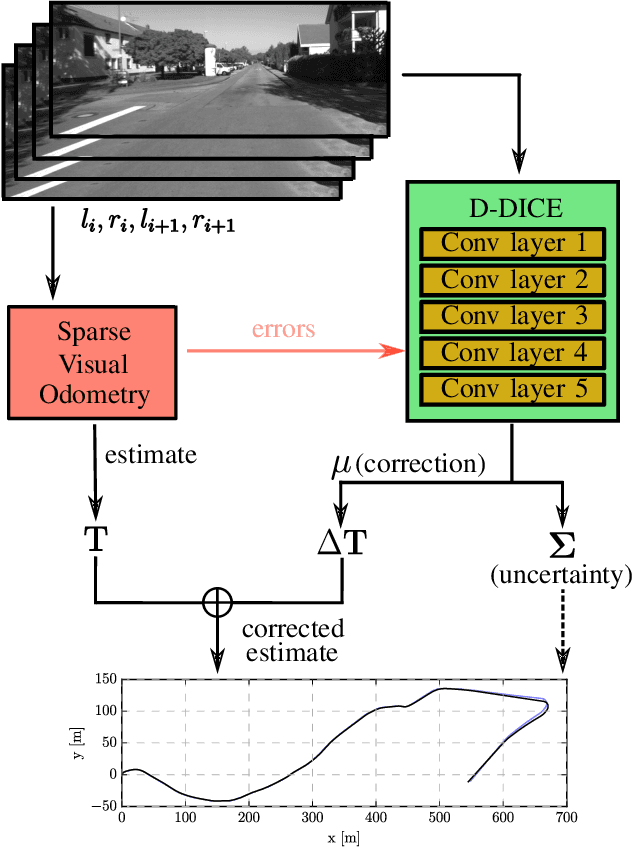
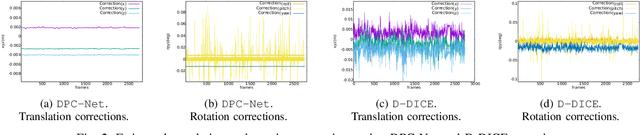
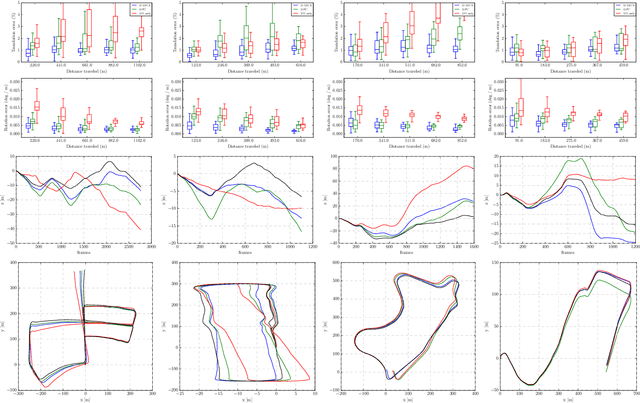
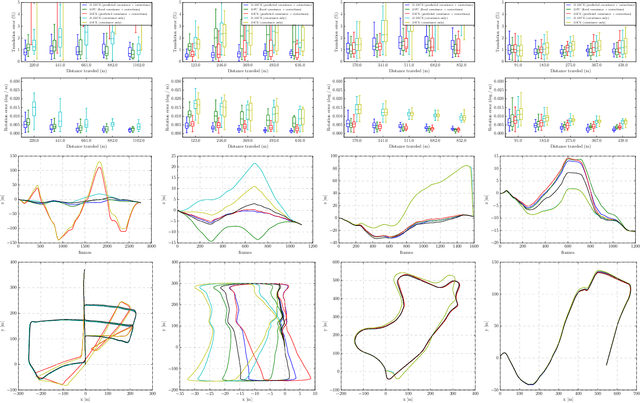
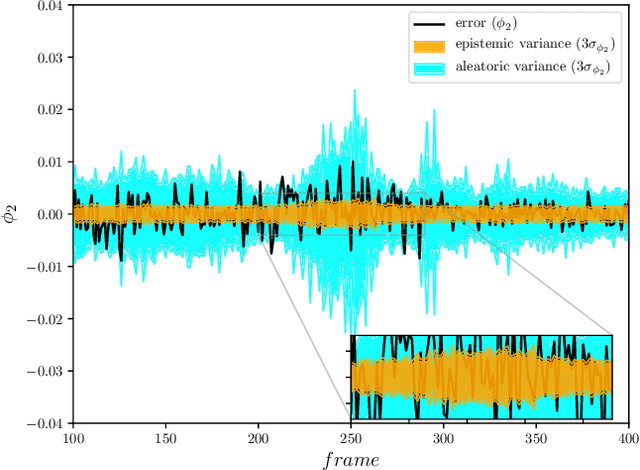
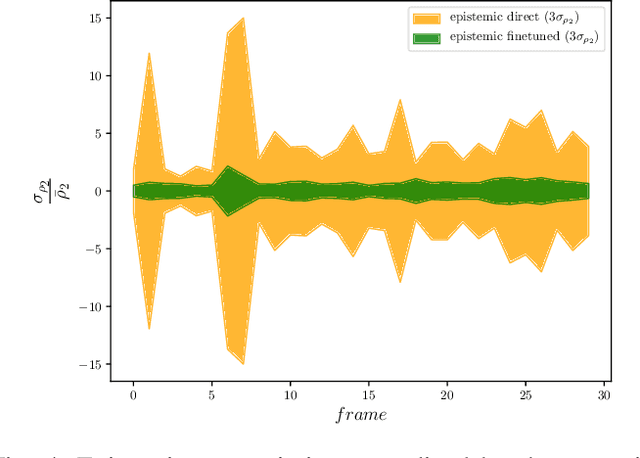
This paper fosters the idea that deep learning methods can be used to complement classical visual odometry pipelines to improve their accuracy and to associate uncertainty models to their estimations. We show that the biases inherent to the visual odometry process can be faithfully learned and compensated for, and that a learning architecture associated with a probabilistic loss function can jointly estimate a full covariance matrix of the residual errors, defining an error model capturing the heteroscedasticity of the process. Experiments on autonomous driving image sequences assess the possibility to concurrently improve visual odometry and estimate an error associated with its outputs.