Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimultaneously Learning Corrections and Error Models for Geometry-based Visual Odometry Methods
Paper and Code
Jul 29, 2020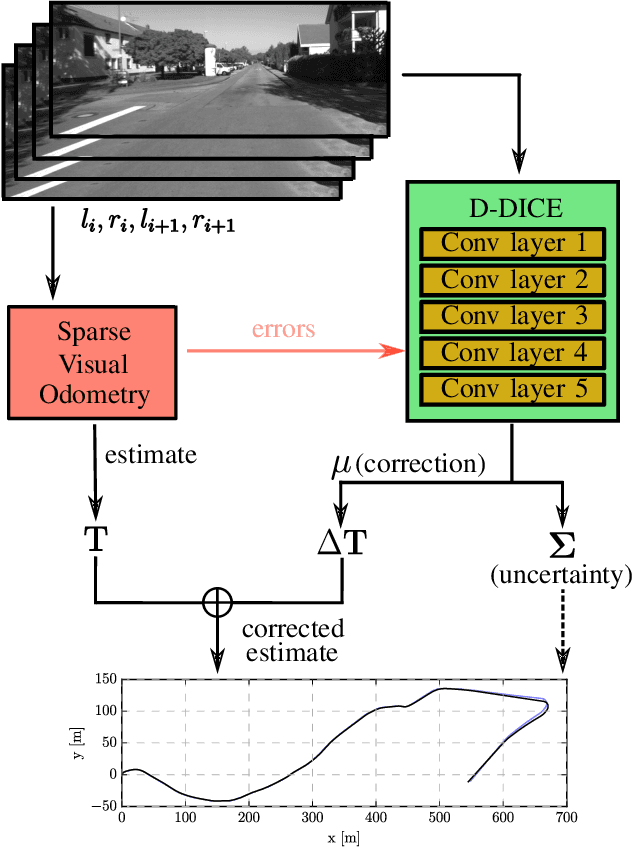
This paper fosters the idea that deep learning methods can be used to complement classical visual odometry pipelines to improve their accuracy and to associate uncertainty models to their estimations. We show that the biases inherent to the visual odometry process can be faithfully learned and compensated for, and that a learning architecture associated with a probabilistic loss function can jointly estimate a full covariance matrix of the residual errors, defining an error model capturing the heteroscedasticity of the process. Experiments on autonomous driving image sequences assess the possibility to concurrently improve visual odometry and estimate an error associated with its outputs.
* Accepted in IEEE Robotics and Automation Letters and IEEE/RSJ
International Conference on Intelligent Robots and Systems (IROS), 2020
View paper on