 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHigh Speed Event Camera TRacking
Paper and Code
Oct 13, 2020
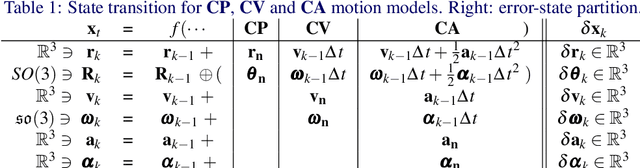

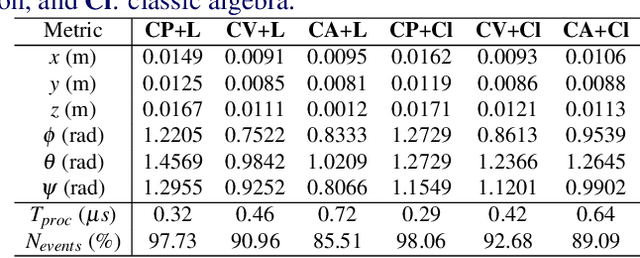
Event cameras are bioinspired sensors with reaction times in the order of microseconds. This property makes them appealing for use in highly-dynamic computer vision applications. In this work,we explore the limits of this sensing technology and present an ultra-fast tracking algorithm able to estimate six-degree-of-freedom motion with dynamics over 25.8 g, at a throughput of 10 kHz,processing over a million events per second. Our method is capable of tracking either camera motion or the motion of an object in front of it, using an error-state Kalman filter formulated in a Lie-theoretic sense. The method includes a robust mechanism for the matching of events with projected line segments with very fast outlier rejection. Meticulous treatment of sparse matrices is applied to achieve real-time performance. Different motion models of varying complexity are considered for the sake of comparison and performance analysis