 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDriveReward: A Comprehensive Dataset and Generative Vision-Language Reward Model for Autonomous Driving
Jun 07, 2026Reward models play a pivotal role in reinforcement learning (RL) and multi-modal trajectory selection for autonomous driving. However, acquiring such rewards typically relies on hand-crafted rule-based objectives or perception ground truth, which hinders generalization for data-scaling. While Vision-Language Models (VLMs) have demonstrated feasibility as reward models in other domains, their effectiveness in driving tasks remains underexplored. In this work, we bridge this gap by (1) introducing DriveReward, a reasoning trajectory evaluation dataset rigorously labeled via temporally-grounded visual guidance, and augmented with counterfactual driving behaviors., (2) alongside a specialized Vision-Language Reward Model. To address the scarcity of failure cases in conventional datasets, we propose a counterfactual data annotation scheme to construct cases encompassing diverse driving styles and erroneous behaviors. Evaluations on our proposed benchmark reveal that even leading open-source and proprietary VLMs fail to excel across all tasks, highlighting significant room for improvement in existing models. Building on these findings, we subsequently tailor a specialized 1B reward model that outperforms larger VLMs on task-specific reward alignment. Finally, we validate our reward model's effectiveness by integrating it into RL finetuning and multi-modal trajectory scoring across multiple baselines, achieving performance comparable to rule-based reward calculations in both open-loop and closed-loop evaluation.
Benchmarking the Robustness of LiDAR-Camera Fusion for 3D Object Detection
May 30, 2022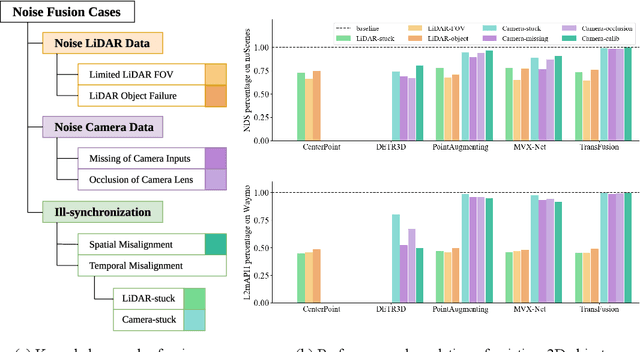
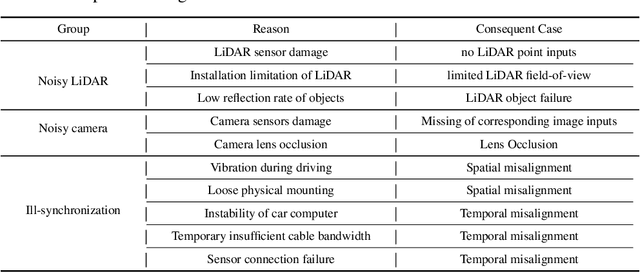
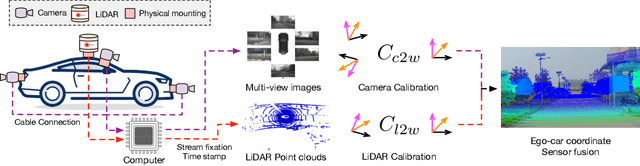
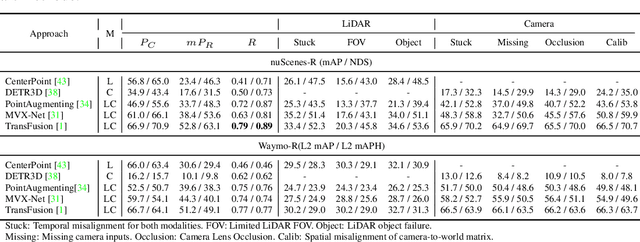
There are two critical sensors for 3D perception in autonomous driving, the camera and the LiDAR. The camera provides rich semantic information such as color, texture, and the LiDAR reflects the 3D shape and locations of surrounding objects. People discover that fusing these two modalities can significantly boost the performance of 3D perception models as each modality has complementary information to the other. However, we observe that current datasets are captured from expensive vehicles that are explicitly designed for data collection purposes, and cannot truly reflect the realistic data distribution due to various reasons. To this end, we collect a series of real-world cases with noisy data distribution, and systematically formulate a robustness benchmark toolkit, that simulates these cases on any clean autonomous driving datasets. We showcase the effectiveness of our toolkit by establishing the robustness benchmark on two widely-adopted autonomous driving datasets, nuScenes and Waymo, then, to the best of our knowledge, holistically benchmark the state-of-the-art fusion methods for the first time. We observe that: i) most fusion methods, when solely developed on these data, tend to fail inevitably when there is a disruption to the LiDAR input; ii) the improvement of the camera input is significantly inferior to the LiDAR one. We further propose an efficient robust training strategy to improve the robustness of the current fusion method. The benchmark and code are available at https://github.com/kcyu2014/lidar-camera-robust-benchmark
3D Lidar Mapping Relative Accuracy Automatic Evaluation Algorithm
Jun 01, 2020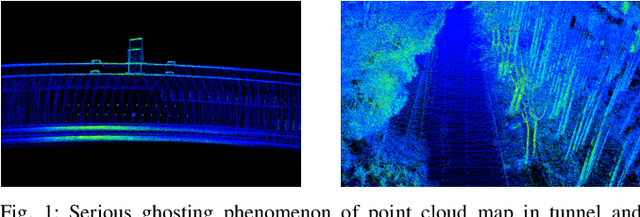
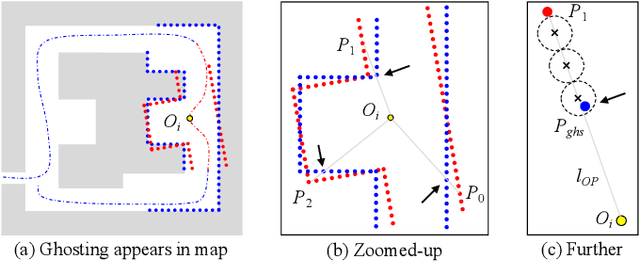
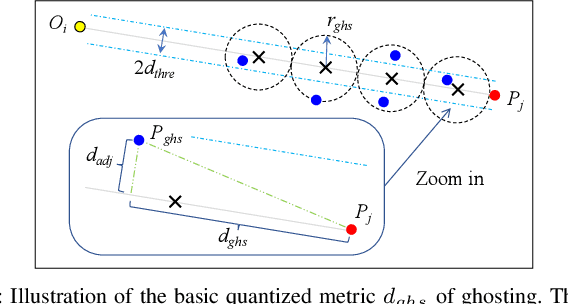
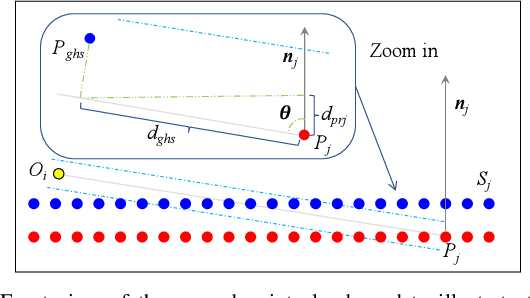
HD (High Definition) map based on 3D lidar plays a vital role in autonomous vehicle localization, planning, decision-making, perception, etc. Many 3D lidar mapping technologies related to SLAM (Simultaneous Localization and Mapping) are used in HD map construction to ensure its high accuracy. To evaluate the accuracy of 3D lidar mapping, the most common methods use ground truth of poses to calculate the error between estimated poses and ground truth, however it's usually so difficult to get the ground truth of poses in the actual lidar mapping for autonomous vehicle. In this paper, we proposed a relative accuracy evaluation algorithm that can automatically evaluate the accuracy of HD map built by 3D lidar mapping without ground truth. A method for detecting the degree of ghosting in point cloud map quantitatively is designed to reflect the accuracy indirectly, which takes advantage of the principle of light traveling in a straight line and the fact that light can not penetrate opaque objects. Our experimental results confirm that the proposed evaluation algorithm can automatically and efficiently detect the bad poses whose accuracy are less than the set threshold such as 0.1m, then calculate the bad poses percentage P_bad in all estimated poses to obtain the final accuracy metric P_acc = 1 - P_bad.