 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3D Lidar Mapping Relative Accuracy Automatic Evaluation Algorithm
Paper and Code
Jun 01, 2020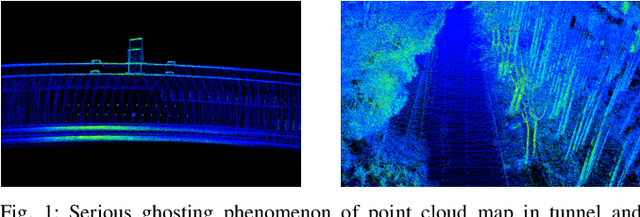
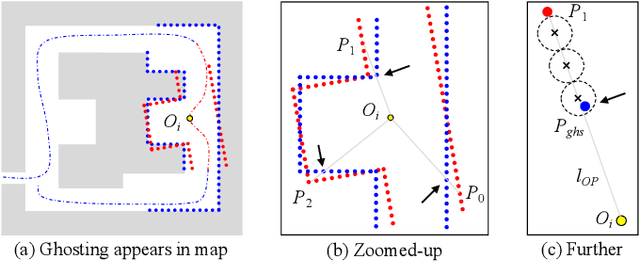
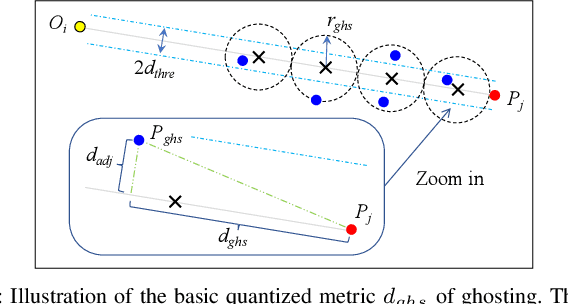
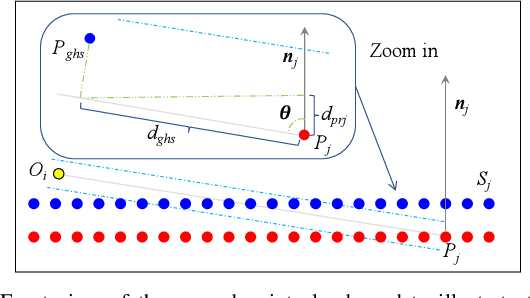
HD (High Definition) map based on 3D lidar plays a vital role in autonomous vehicle localization, planning, decision-making, perception, etc. Many 3D lidar mapping technologies related to SLAM (Simultaneous Localization and Mapping) are used in HD map construction to ensure its high accuracy. To evaluate the accuracy of 3D lidar mapping, the most common methods use ground truth of poses to calculate the error between estimated poses and ground truth, however it's usually so difficult to get the ground truth of poses in the actual lidar mapping for autonomous vehicle. In this paper, we proposed a relative accuracy evaluation algorithm that can automatically evaluate the accuracy of HD map built by 3D lidar mapping without ground truth. A method for detecting the degree of ghosting in point cloud map quantitatively is designed to reflect the accuracy indirectly, which takes advantage of the principle of light traveling in a straight line and the fact that light can not penetrate opaque objects. Our experimental results confirm that the proposed evaluation algorithm can automatically and efficiently detect the bad poses whose accuracy are less than the set threshold such as 0.1m, then calculate the bad poses percentage P_bad in all estimated poses to obtain the final accuracy metric P_acc = 1 - P_bad.