 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRethinking Dimensionality Reduction in Grid-based 3D Object Detection
Sep 24, 2022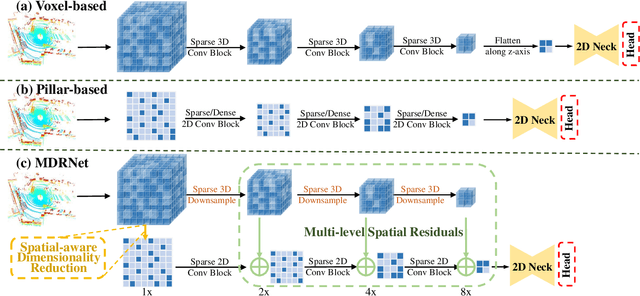
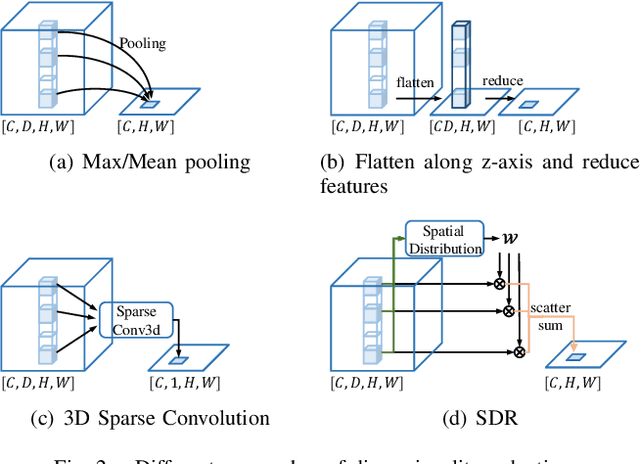
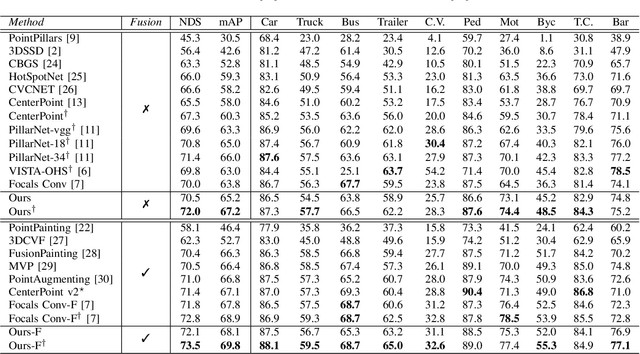
Bird's eye view (BEV) is widely adopted by most of the current point cloud detectors due to the applicability of well-explored 2D detection techniques. However, existing methods obtain BEV features by simply collapsing voxel or point features along the height dimension, which causes the heavy loss of 3D spatial information. To alleviate the information loss, we propose a novel point cloud detection network based on a Multi-level feature dimensionality reduction strategy, called MDRNet. In MDRNet, the Spatial-aware Dimensionality Reduction (SDR) is designed to dynamically focus on the valuable parts of the object during voxel-to-BEV feature transformation. Furthermore, the Multi-level Spatial Residuals (MSR) is proposed to fuse the multi-level spatial information in the BEV feature maps. Extensive experiments on nuScenes show that the proposed method outperforms the state-of-the-art methods. The code will be available upon publication.
WT-MVSNet: Window-based Transformers for Multi-view Stereo
May 28, 2022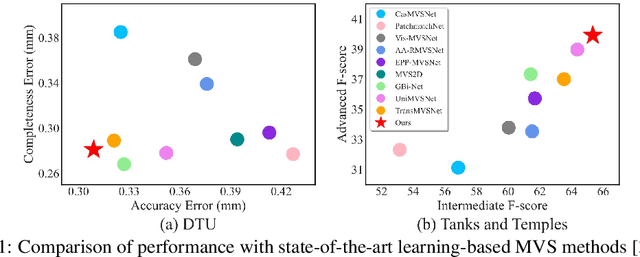
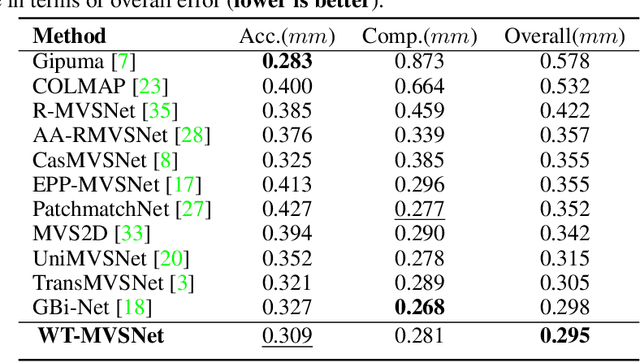
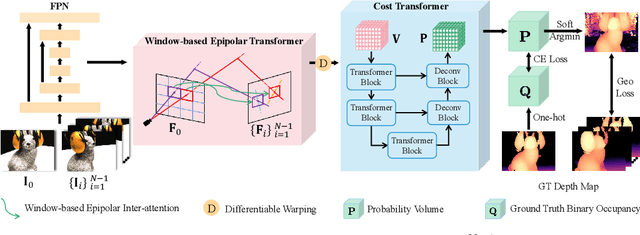
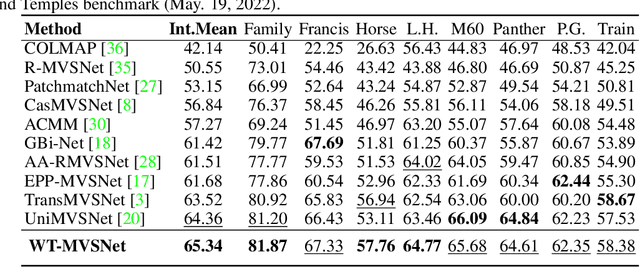
Recently, Transformers were shown to enhance the performance of multi-view stereo by enabling long-range feature interaction. In this work, we propose Window-based Transformers (WT) for local feature matching and global feature aggregation in multi-view stereo. We introduce a Window-based Epipolar Transformer (WET) which reduces matching redundancy by using epipolar constraints. Since point-to-line matching is sensitive to erroneous camera pose and calibration, we match windows near the epipolar lines. A second Shifted WT is employed for aggregating global information within cost volume. We present a novel Cost Transformer (CT) to replace 3D convolutions for cost volume regularization. In order to better constrain the estimated depth maps from multiple views, we further design a novel geometric consistency loss (Geo Loss) which punishes unreliable areas where multi-view consistency is not satisfied. Our WT multi-view stereo method (WT-MVSNet) achieves state-of-the-art performance across multiple datasets and ranks $1^{st}$ on Tanks and Temples benchmark.