 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRethinking Dimensionality Reduction in Grid-based 3D Object Detection
Paper and Code
Sep 24, 2022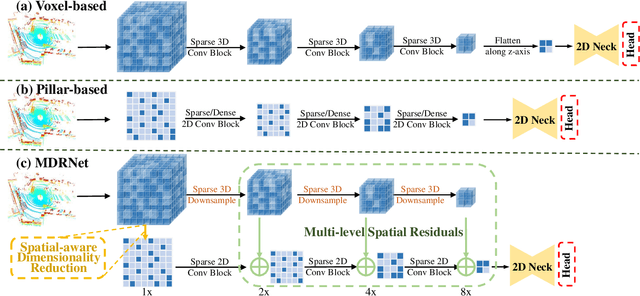
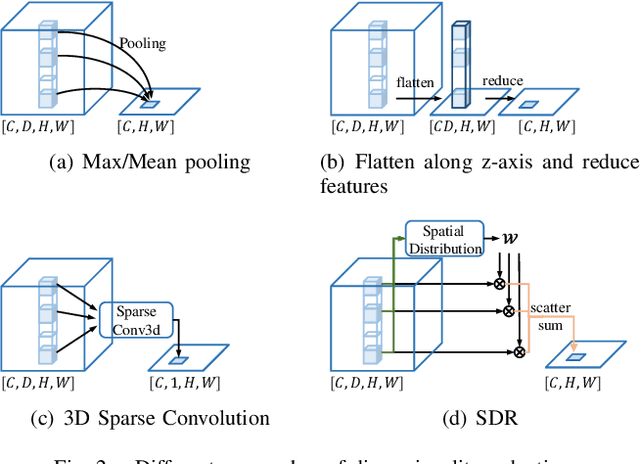
Bird's eye view (BEV) is widely adopted by most of the current point cloud detectors due to the applicability of well-explored 2D detection techniques. However, existing methods obtain BEV features by simply collapsing voxel or point features along the height dimension, which causes the heavy loss of 3D spatial information. To alleviate the information loss, we propose a novel point cloud detection network based on a Multi-level feature dimensionality reduction strategy, called MDRNet. In MDRNet, the Spatial-aware Dimensionality Reduction (SDR) is designed to dynamically focus on the valuable parts of the object during voxel-to-BEV feature transformation. Furthermore, the Multi-level Spatial Residuals (MSR) is proposed to fuse the multi-level spatial information in the BEV feature maps. Extensive experiments on nuScenes show that the proposed method outperforms the state-of-the-art methods. The code will be available upon publication.