 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutoRemover: Automatic Object Removal for Autonomous Driving Videos
Nov 28, 2019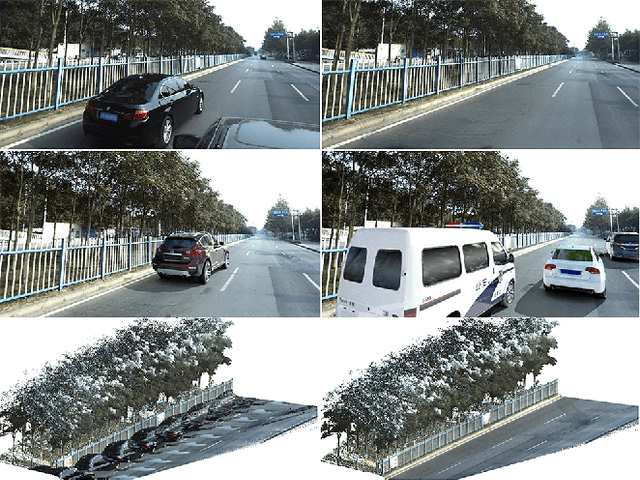
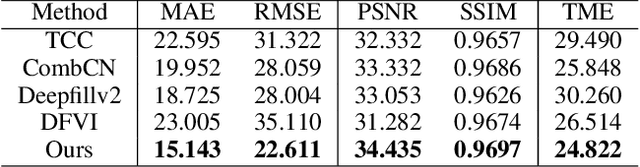
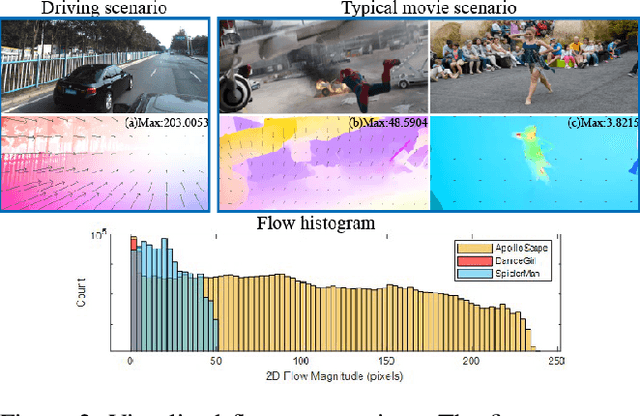
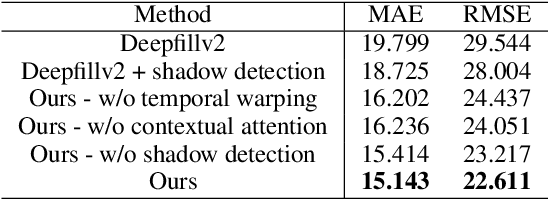
Motivated by the need for photo-realistic simulation in autonomous driving, in this paper we present a video inpainting algorithm \emph{AutoRemover}, designed specifically for generating street-view videos without any moving objects. In our setup we have two challenges: the first is the shadow, shadows are usually unlabeled but tightly coupled with the moving objects. The second is the large ego-motion in the videos. To deal with shadows, we build up an autonomous driving shadow dataset and design a deep neural network to detect shadows automatically. To deal with large ego-motion, we take advantage of the multi-source data, in particular the 3D data, in autonomous driving. More specifically, the geometric relationship between frames is incorporated into an inpainting deep neural network to produce high-quality structurally consistent video output. Experiments show that our method outperforms other state-of-the-art (SOTA) object removal algorithms, reducing the RMSE by over $19\%$.
A Computational Model of Afterimages based on Simultaneous and Successive Contrasts
Sep 13, 2017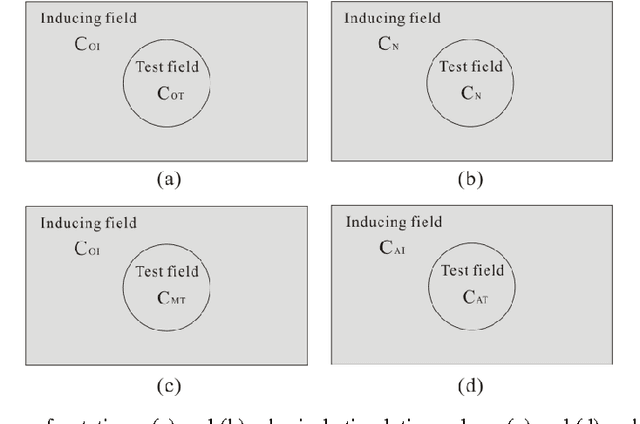
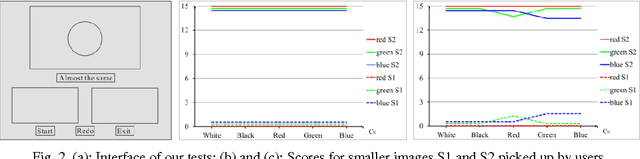
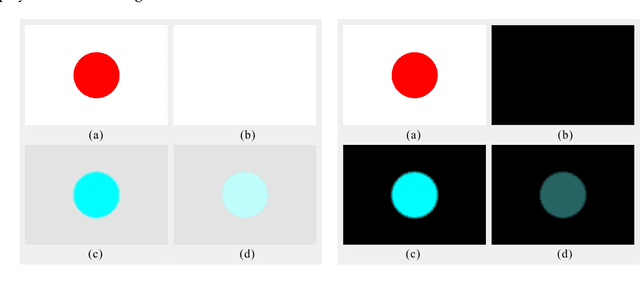
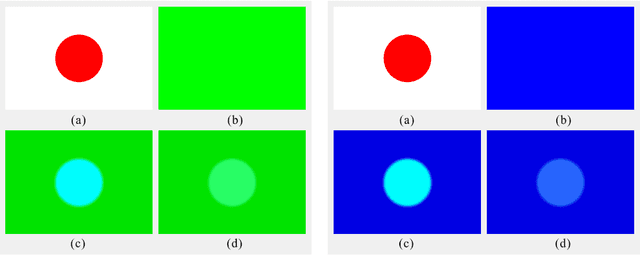
Negative afterimage appears in our vision when we shift our gaze from an over stimulated original image to a new area with a uniform color. The colors of negative afterimages differ from the old stimulating colors in the original image when the color in the new area is either neutral or chromatic. The interaction between stimulating colors in the test and inducing field in the original image changes our color perception due to simultaneous contrast, and the interaction between changed colors perceived in the previously-viewed field and the color in the currently-viewed field also affects our perception of colors in negative afterimages due to successive contrast. Based on these observations we propose a computational model to estimate colors of negative afterimages in more general cases where the original stimulating color in the test field is chromatic, and the original stimulating color in the inducing field and the new stimulating color can be either neutral or chromatic. We validate our model with human experiments.