 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModelling of Bi-directional Spatio-Temporal Dependence and Users' Dynamic Preferences for Missing POI Check-in Identification
Dec 31, 2021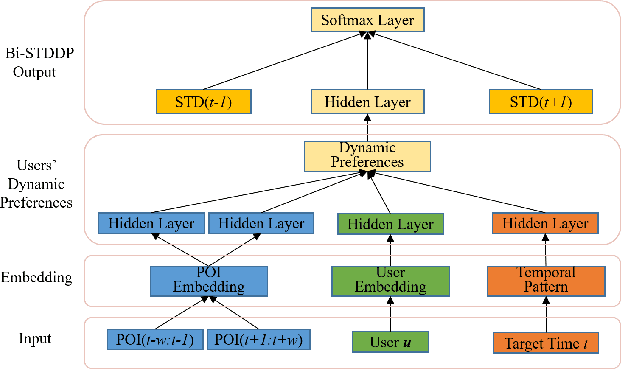
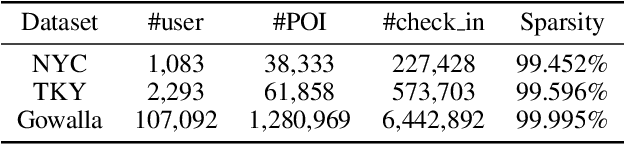

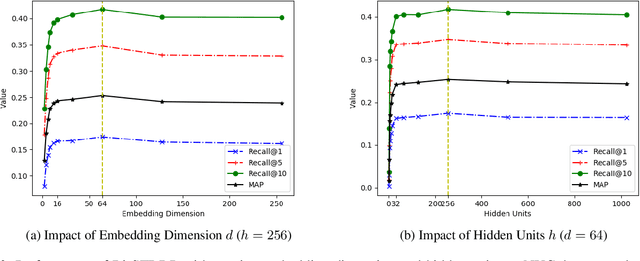
Human mobility data accumulated from Point-of-Interest (POI) check-ins provides great opportunity for user behavior understanding. However, data quality issues (e.g., geolocation information missing, unreal check-ins, data sparsity) in real-life mobility data limit the effectiveness of existing POI-oriented studies, e.g., POI recommendation and location prediction, when applied to real applications. To this end, in this paper, we develop a model, named Bi-STDDP, which can integrate bi-directional spatio-temporal dependence and users' dynamic preferences, to identify the missing POI check-in where a user has visited at a specific time. Specifically, we first utilize bi-directional global spatial and local temporal information of POIs to capture the complex dependence relationships. Then, target temporal pattern in combination with user and POI information are fed into a multi-layer network to capture users' dynamic preferences. Moreover, the dynamic preferences are transformed into the same space as the dependence relationships to form the final model. Finally, the proposed model is evaluated on three large-scale real-world datasets and the results demonstrate significant improvements of our model compared with state-of-the-art methods. Also, it is worth noting that the proposed model can be naturally extended to address POI recommendation and location prediction tasks with competitive performances.
Out-of-Town Recommendation with Travel Intention Modeling
Feb 06, 2021
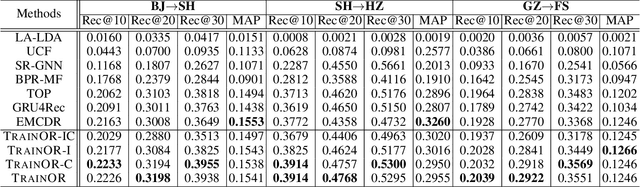
Out-of-town recommendation is designed for those users who leave their home-town areas and visit the areas they have never been to before. It is challenging to recommend Point-of-Interests (POIs) for out-of-town users since the out-of-town check-in behavior is determined by not only the user's home-town preference but also the user's travel intention. Besides, the user's travel intentions are complex and dynamic, which leads to big difficulties in understanding such intentions precisely. In this paper, we propose a TRAvel-INtention-aware Out-of-town Recommendation framework, named TRAINOR. The proposed TRAINOR framework distinguishes itself from existing out-of-town recommenders in three aspects. First, graph neural networks are explored to represent users' home-town check-in preference and geographical constraints in out-of-town check-in behaviors. Second, a user-specific travel intention is formulated as an aggregation combining home-town preference and generic travel intention together, where the generic travel intention is regarded as a mixture of inherent intentions that can be learned by Neural Topic Model (NTM). Third, a non-linear mapping function, as well as a matrix factorization method, are employed to transfer users' home-town preference and estimate out-of-town POI's representation, respectively. Extensive experiments on real-world data sets validate the effectiveness of the TRAINOR framework. Moreover, the learned travel intention can deliver meaningful explanations for understanding a user's travel purposes.
Modeling Heterogeneous Relations across Multiple Modes for Potential Crowd Flow Prediction
Jan 18, 2021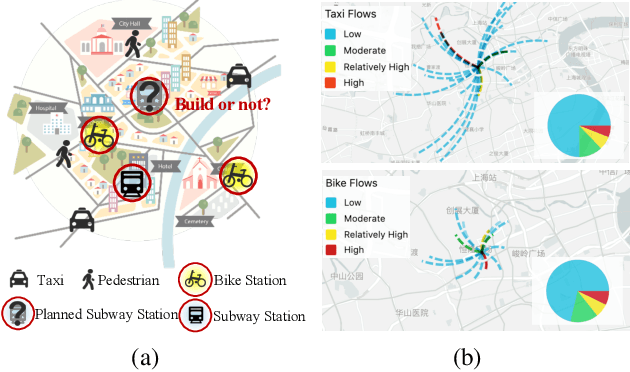

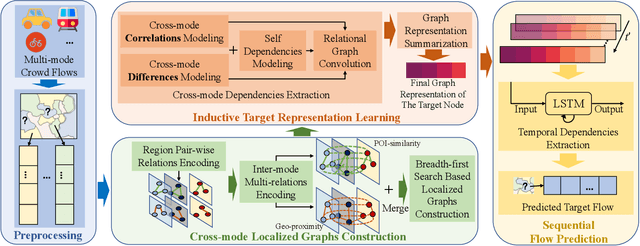
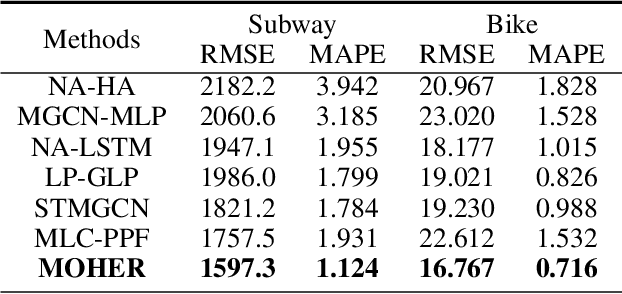
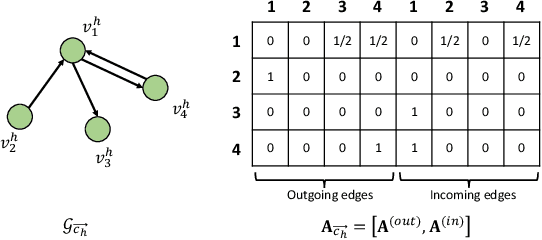
Potential crowd flow prediction for new planned transportation sites is a fundamental task for urban planners and administrators. Intuitively, the potential crowd flow of the new coming site can be implied by exploring the nearby sites. However, the transportation modes of nearby sites (e.g. bus stations, bicycle stations) might be different from the target site (e.g. subway station), which results in severe data scarcity issues. To this end, we propose a data driven approach, named MOHER, to predict the potential crowd flow in a certain mode for a new planned site. Specifically, we first identify the neighbor regions of the target site by examining the geographical proximity as well as the urban function similarity. Then, to aggregate these heterogeneous relations, we devise a cross-mode relational GCN, a novel relation-specific transformation model, which can learn not only the correlations but also the differences between different transportation modes. Afterward, we design an aggregator for inductive potential flow representation. Finally, an LTSM module is used for sequential flow prediction. Extensive experiments on real-world data sets demonstrate the superiority of the MOHER framework compared with the state-of-the-art algorithms.
Exploiting Interpretable Patterns for Flow Prediction in Dockless Bike Sharing Systems
Apr 13, 2020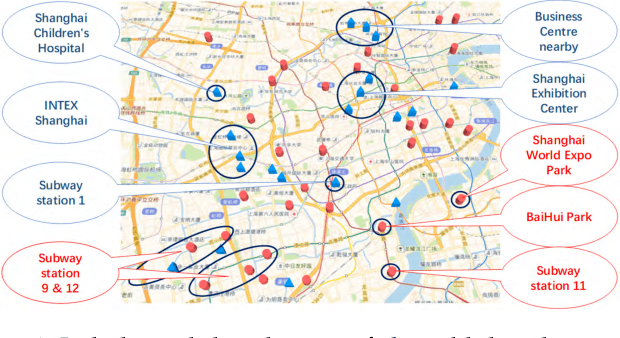

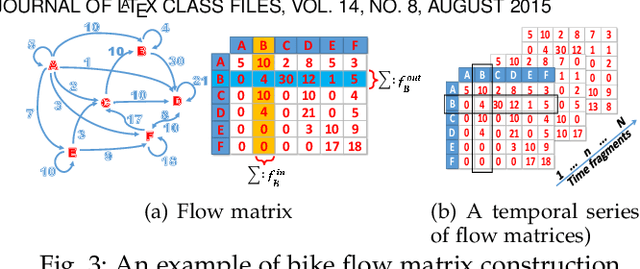
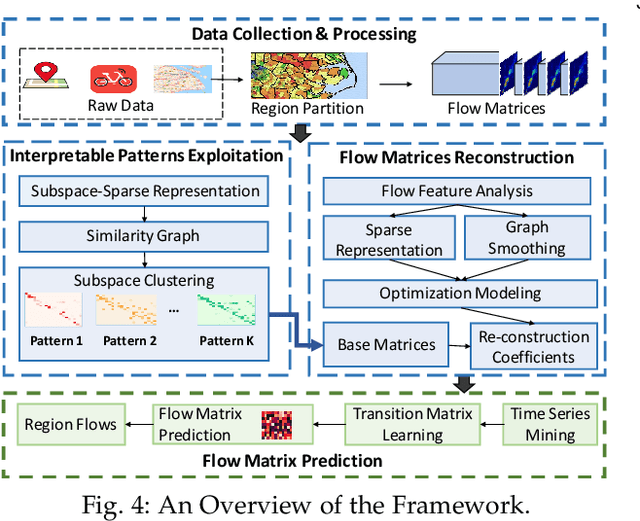
Unlike the traditional dock-based systems, dockless bike-sharing systems are more convenient for users in terms of flexibility. However, the flexibility of these dockless systems comes at the cost of management and operation complexity. Indeed, the imbalanced and dynamic use of bikes leads to mandatory rebalancing operations, which impose a critical need for effective bike traffic flow prediction. While efforts have been made in developing traffic flow prediction models, existing approaches lack interpretability, and thus have limited value in practical deployment. To this end, we propose an Interpretable Bike Flow Prediction (IBFP) framework, which can provide effective bike flow prediction with interpretable traffic patterns. Specifically, by dividing the urban area into regions according to flow density, we first model the spatio-temporal bike flows between regions with graph regularized sparse representation, where graph Laplacian is used as a smooth operator to preserve the commonalities of the periodic data structure. Then, we extract traffic patterns from bike flows using subspace clustering with sparse representation to construct interpretable base matrices. Moreover, the bike flows can be predicted with the interpretable base matrices and learned parameters. Finally, experimental results on real-world data show the advantages of the IBFP method for flow prediction in dockless bike sharing systems. In addition, the interpretability of our flow pattern exploitation is further illustrated through a case study where IBFP provides valuable insights into bike flow analysis.