 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntroduction to The Dynamic Pickup and Delivery Problem Benchmark -- ICAPS 2021 Competition
Jan 19, 2022The Dynamic Pickup and Delivery Problem (DPDP) is an essential problem within the logistics domain. So far, research on this problem has mainly focused on using artificial data which fails to reflect the complexity of real-world problems. In this draft, we would like to introduce a new benchmark from real business scenarios as well as a simulator supporting the dynamic evaluation. The benchmark and simulator have been published and successfully supported the ICAPS 2021 Dynamic Pickup and Delivery Problem competition participated by 152 teams.
Learning to Optimize Industry-Scale Dynamic Pickup and Delivery Problems
May 27, 2021The Dynamic Pickup and Delivery Problem (DPDP) is aimed at dynamically scheduling vehicles among multiple sites in order to minimize the cost when delivery orders are not known a priori. Although DPDP plays an important role in modern logistics and supply chain management, state-of-the-art DPDP algorithms are still limited on their solution quality and efficiency. In practice, they fail to provide a scalable solution as the numbers of vehicles and sites become large. In this paper, we propose a data-driven approach, Spatial-Temporal Aided Double Deep Graph Network (ST-DDGN), to solve industry-scale DPDP. In our method, the delivery demands are first forecast using spatial-temporal prediction method, which guides the neural network to perceive spatial-temporal distribution of delivery demand when dispatching vehicles. Besides, the relationships of individuals such as vehicles are modelled by establishing a graph-based value function. ST-DDGN incorporates attention-based graph embedding with Double DQN (DDQN). As such, it can make the inference across vehicles more efficiently compared with traditional methods. Our method is entirely data driven and thus adaptive, i.e., the relational representation of adjacent vehicles can be learned and corrected by ST-DDGN from data periodically. We have conducted extensive experiments over real-world data to evaluate our solution. The results show that ST-DDGN reduces 11.27% number of the used vehicles and decreases 13.12% total transportation cost on average over the strong baselines, including the heuristic algorithm deployed in our UAT (User Acceptance Test) environment and a variety of vanilla DRL methods. We are due to fully deploy our solution into our online logistics system and it is estimated that millions of USD logistics cost can be saved per year.
Bilevel Learning Model Towards Industrial Scheduling
Aug 10, 2020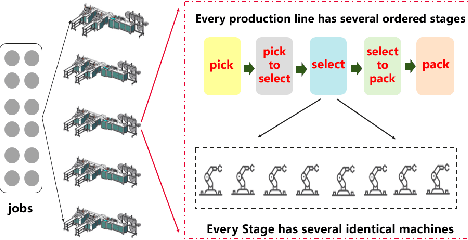
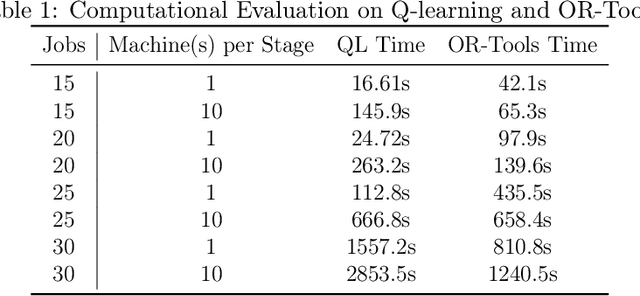
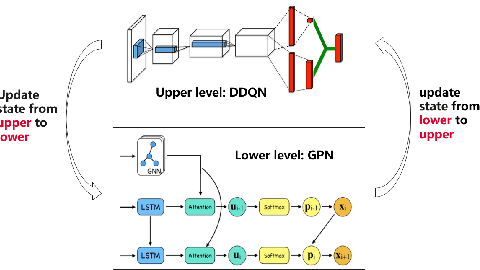
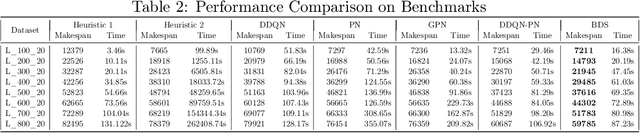
Automatic industrial scheduling, aiming at optimizing the sequence of jobs over limited resources, is widely needed in manufacturing industries. However, existing scheduling systems heavily rely on heuristic algorithms, which either generate ineffective solutions or compute inefficiently when job scale increases. Thus, it is of great importance to develop new large-scale algorithms that are not only efficient and effective, but also capable of satisfying complex constraints in practice. In this paper, we propose a Bilevel Deep reinforcement learning Scheduler, \textit{BDS}, in which the higher level is responsible for exploring an initial global sequence, whereas the lower level is aiming at exploitation for partial sequence refinements, and the two levels are connected by a sliding-window sampling mechanism. In the implementation, a Double Deep Q Network (DDQN) is used in the upper level and Graph Pointer Network (GPN) lies within the lower level. After the theoretical guarantee for the convergence of BDS, we evaluate it in an industrial automatic warehouse scenario, with job number up to $5000$ in each production line. It is shown that our proposed BDS significantly outperforms two most used heuristics, three strong deep networks, and another bilevel baseline approach. In particular, compared with the most used greedy-based heuristic algorithm in real world which takes nearly an hour, our BDS can decrease the makespan by 27.5\%, 28.6\% and 22.1\% for 3 largest datasets respectively, with computational time less than 200 seconds.