 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFixed Viewpoint Mirror Surface Reconstruction under an Uncalibrated Camera
Jan 23, 2021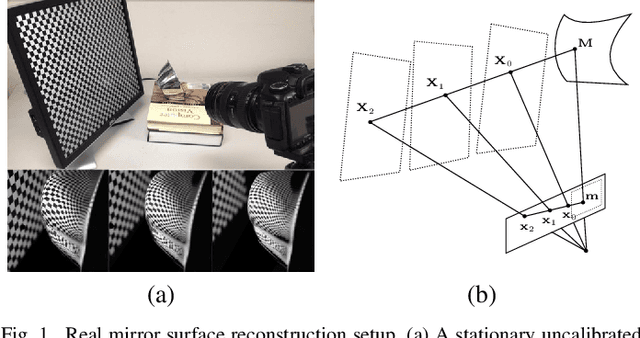
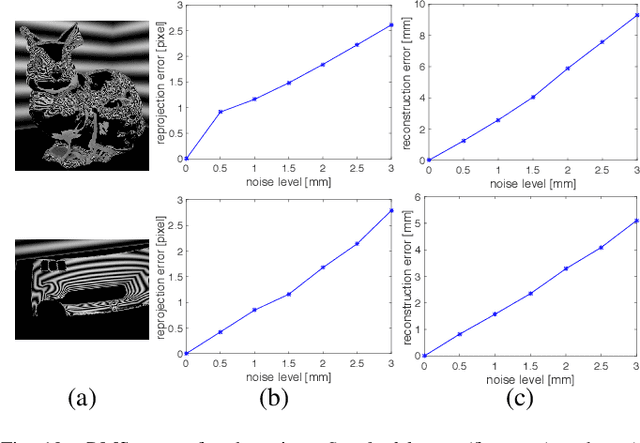

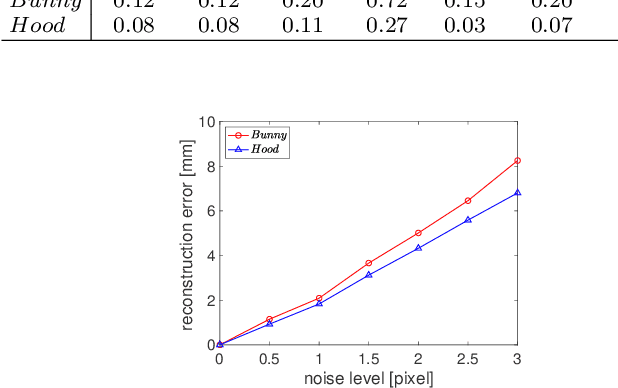
This paper addresses the problem of mirror surface reconstruction, and proposes a solution based on observing the reflections of a moving reference plane on the mirror surface. Unlike previous approaches which require tedious calibration, our method can recover the camera intrinsics, the poses of the reference plane, as well as the mirror surface from the observed reflections of the reference plane under at least three unknown distinct poses. We first show that the 3D poses of the reference plane can be estimated from the reflection correspondences established between the images and the reference plane. We then form a bunch of 3D lines from the reflection correspondences, and derive an analytical solution to recover the line projection matrix. We transform the line projection matrix to its equivalent camera projection matrix, and propose a cross-ratio based formulation to optimize the camera projection matrix by minimizing reprojection errors. The mirror surface is then reconstructed based on the optimized cross-ratio constraint. Experimental results on both synthetic and real data are presented, which demonstrate the feasibility and accuracy of our method.
Bilevel Learning Model Towards Industrial Scheduling
Aug 10, 2020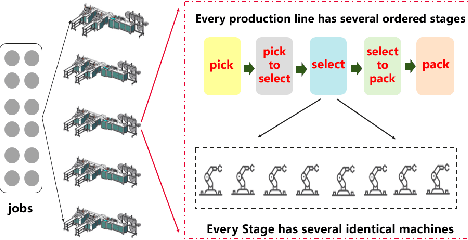
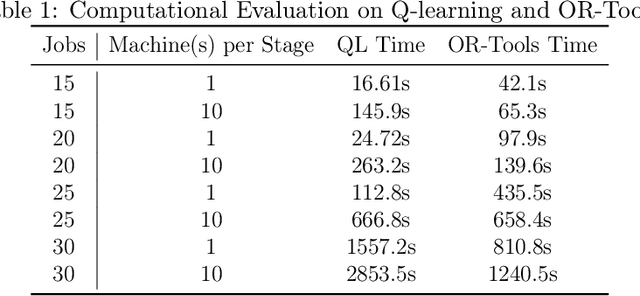
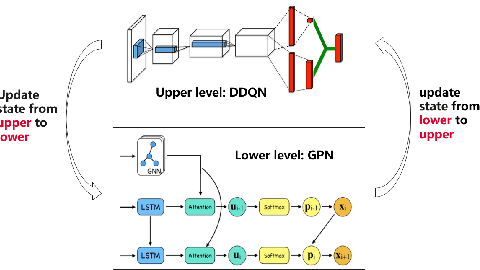
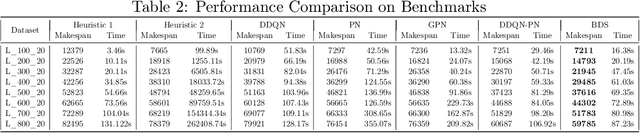
Automatic industrial scheduling, aiming at optimizing the sequence of jobs over limited resources, is widely needed in manufacturing industries. However, existing scheduling systems heavily rely on heuristic algorithms, which either generate ineffective solutions or compute inefficiently when job scale increases. Thus, it is of great importance to develop new large-scale algorithms that are not only efficient and effective, but also capable of satisfying complex constraints in practice. In this paper, we propose a Bilevel Deep reinforcement learning Scheduler, \textit{BDS}, in which the higher level is responsible for exploring an initial global sequence, whereas the lower level is aiming at exploitation for partial sequence refinements, and the two levels are connected by a sliding-window sampling mechanism. In the implementation, a Double Deep Q Network (DDQN) is used in the upper level and Graph Pointer Network (GPN) lies within the lower level. After the theoretical guarantee for the convergence of BDS, we evaluate it in an industrial automatic warehouse scenario, with job number up to $5000$ in each production line. It is shown that our proposed BDS significantly outperforms two most used heuristics, three strong deep networks, and another bilevel baseline approach. In particular, compared with the most used greedy-based heuristic algorithm in real world which takes nearly an hour, our BDS can decrease the makespan by 27.5\%, 28.6\% and 22.1\% for 3 largest datasets respectively, with computational time less than 200 seconds.