 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeApplication Research On Real-Time Perception Of Device Performance Status
Sep 05, 2024


In order to accurately identify the performance status of mobile devices and finely adjust the user experience, a real-time performance perception evaluation method based on TOPSIS (Technique for Order Preference by Similarity to Ideal Solution) combined with entropy weighting method and time series model construction was studied. After collecting the performance characteristics of various mobile devices, the device performance profile was fitted by using PCA (principal component analysis) dimensionality reduction and feature engineering methods such as descriptive time series analysis. The ability of performance features and profiles to describe the real-time performance status of devices was understood and studied by applying the TOPSIS method and multi-level weighting processing. A time series model was constructed for the feature set under objective weighting, and multiple sensitivity (real-time, short-term, long-term) performance status perception results were provided to obtain real-time performance evaluation data and long-term stable performance prediction data. Finally, by configuring dynamic AB experiments and overlaying fine-grained power reduction strategies, the usability of the method was verified, and the accuracy of device performance status identification and prediction was compared with the performance of the profile features including dimensionality reduction time series modeling, TOPSIS method and entropy weighting method, subjective weighting, HMA method. The results show that accurate real-time performance perception results can greatly enhance business value, and this research has application effectiveness and certain forward-looking significance.
IROS 2019 Lifelong Robotic Vision Challenge -- Lifelong Object Recognition Report
Apr 26, 2020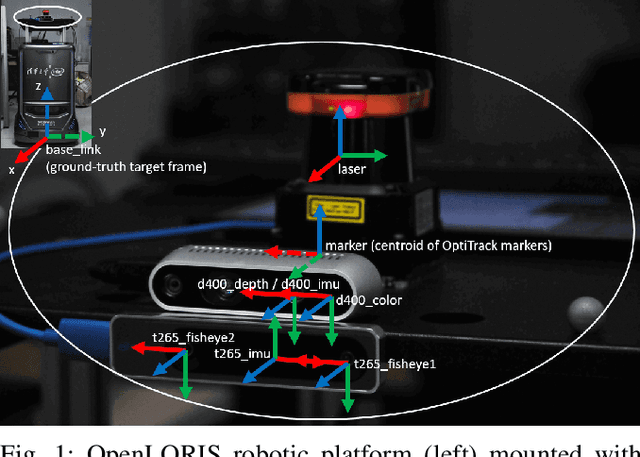
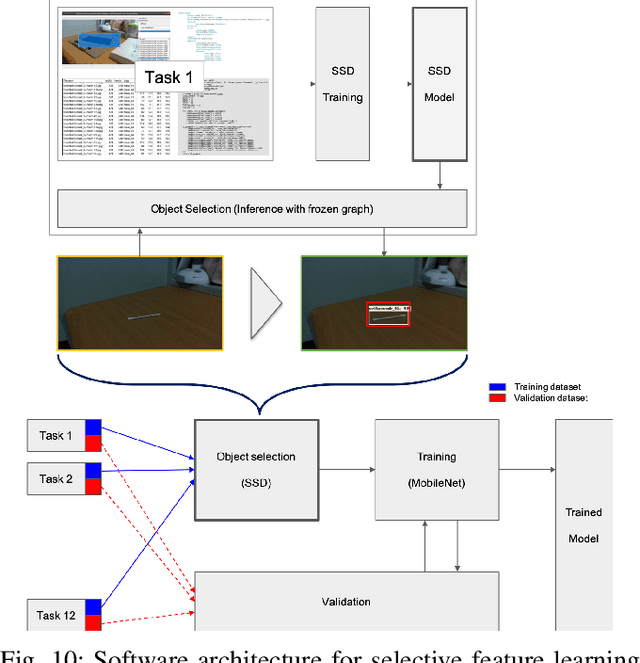
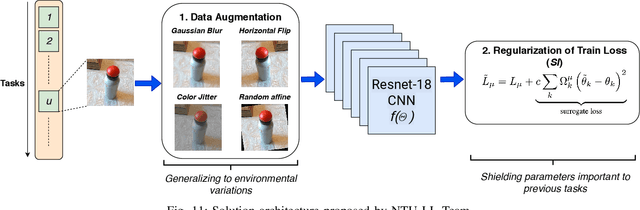
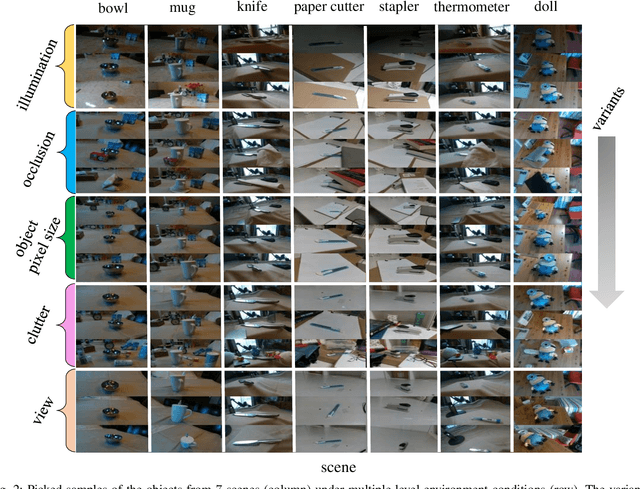
This report summarizes IROS 2019-Lifelong Robotic Vision Competition (Lifelong Object Recognition Challenge) with methods and results from the top $8$ finalists (out of over~$150$ teams). The competition dataset (L)ifel(O)ng (R)obotic V(IS)ion (OpenLORIS) - Object Recognition (OpenLORIS-object) is designed for driving lifelong/continual learning research and application in robotic vision domain, with everyday objects in home, office, campus, and mall scenarios. The dataset explicitly quantifies the variants of illumination, object occlusion, object size, camera-object distance/angles, and clutter information. Rules are designed to quantify the learning capability of the robotic vision system when faced with the objects appearing in the dynamic environments in the contest. Individual reports, dataset information, rules, and released source code can be found at the project homepage: "https://lifelong-robotic-vision.github.io/competition/".