 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHarnessing Intra-group Variations Via a Population-Level Context for Pathology Detection
Mar 04, 2024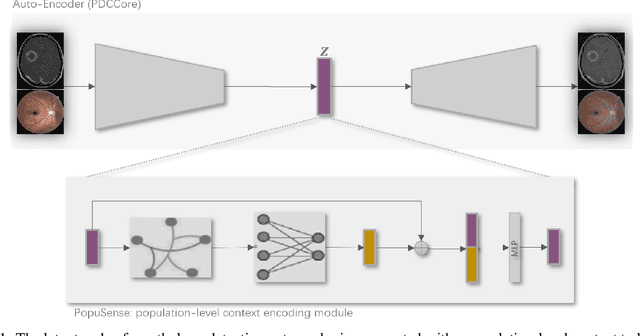
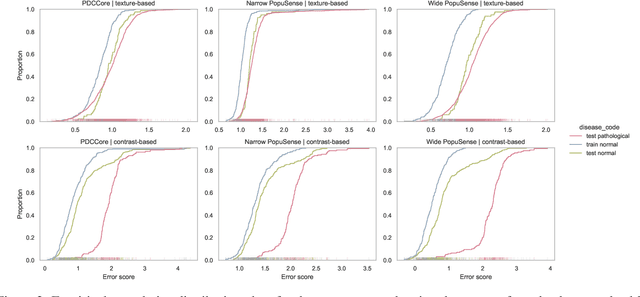
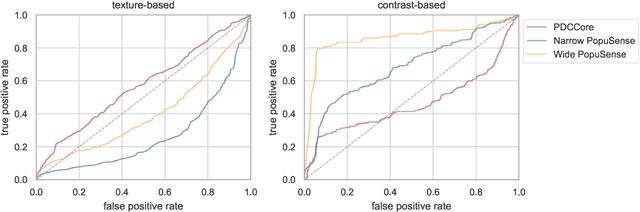
Realizing sufficient separability between the distributions of healthy and pathological samples is a critical obstacle for pathology detection convolutional models. Moreover, these models exhibit a bias for contrast-based images, with diminished performance on texture-based medical images. This study introduces the notion of a population-level context for pathology detection and employs a graph theoretic approach to model and incorporate it into the latent code of an autoencoder via a refinement module we term PopuSense. PopuSense seeks to capture additional intra-group variations inherent in biomedical data that a local or global context of the convolutional model might miss or smooth out. Experiments on contrast-based and texture-based images, with minimal adaptation, encounter the existing preference for intensity-based input. Nevertheless, PopuSense demonstrates improved separability in contrast-based images, presenting an additional avenue for refining representations learned by a model.
Data Might be Enough: Bridge Real-World Traffic Signal Control Using Offline Reinforcement Learning
Mar 20, 2023Applying reinforcement learning (RL) to traffic signal control (TSC) has become a promising solution. However, most RL-based methods focus solely on optimization within simulators and give little thought to deployment issues in the real world. Online RL-based methods, which require interaction with the environment, are limited in their interactions with the real-world environment. Additionally, acquiring an offline dataset for offline RL is challenging in the real world. Moreover, most real-world intersections prefer a cyclical phase structure. To address these challenges, we propose: (1) a cyclical offline dataset (COD), designed based on common real-world scenarios to facilitate easy collection; (2) an offline RL model called DataLight, capable of learning satisfactory control strategies from the COD; and (3) a method called Arbitrary To Cyclical (ATC), which can transform most RL-based methods into cyclical signal control. Extensive experiments using real-world datasets on simulators demonstrate that: (1) DataLight outperforms most existing methods and achieves comparable results with the best-performing method; (2) introducing ATC into some recent RL-based methods achieves satisfactory performance; and (3) COD is reliable, with DataLight remaining robust even with a small amount of data. These results suggest that the cyclical offline dataset might be enough for offline RL for TSC. Our proposed methods make significant contributions to the TSC field and successfully bridge the gap between simulation experiments and real-world applications. Our code is released on Github.
DynLight: Realize dynamic phase duration with multi-level traffic signal control
Apr 20, 2022
Adopting reinforcement learning (RL) for traffic signal control (TSC) is increasingly popular, and RL has become a promising solution for traffic signal control. However, several challenges still need to be overcome. Firstly, most RL methods use fixed action duration and select the green phase for the next state, which makes the phase duration less dynamic and flexible. Secondly, the phase sequence of RL methods can be arbitrary, affecting the real-world deployment which may require a cyclical phase structure. Lastly, the average travel time and throughput are not fair metrics to evaluate TSC performance. To address these challenges, we propose a multi-level traffic signal control framework, DynLight, which uses an optimization method Max-QueueLength (M-QL) to determine the phase and uses a deep Q-network to determine the duration of the corresponding phase. Based on DynLight, we further propose DynLight-C which adopts a well-trained deep Q-network of DynLight and replace M-QL with a cyclical control policy that actuates a set of phases in fixed cyclical order to realize cyclical phase structure. Comprehensive experiments on multiple real-world datasets demonstrate that DynLight achieves a new state-of-the-art. Furthermore, the deep Q-network of DynLight can learn well on determining the phase duration and DynLight-C demonstrates high performance for deployment.
Knowledge intensive state design for traffic signal control
Dec 30, 2021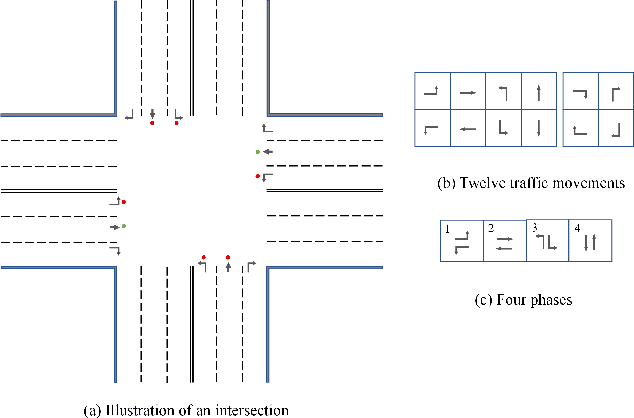
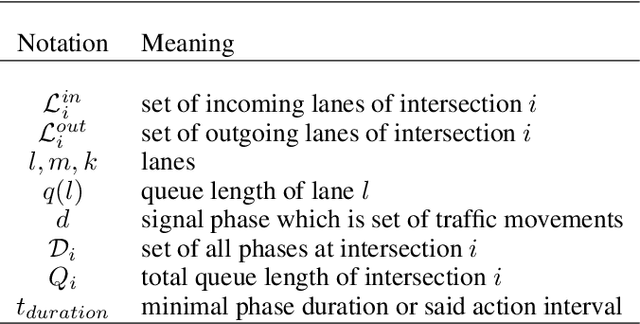
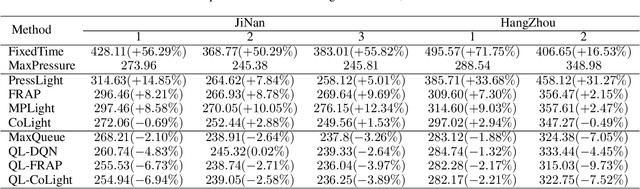
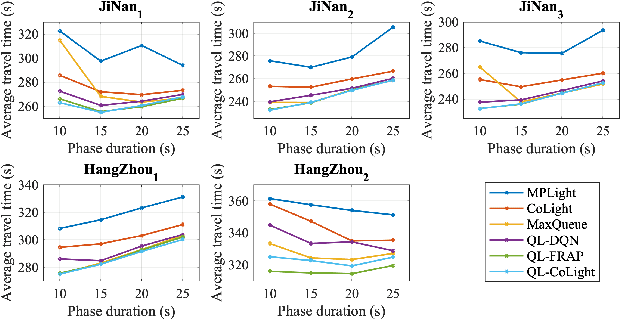
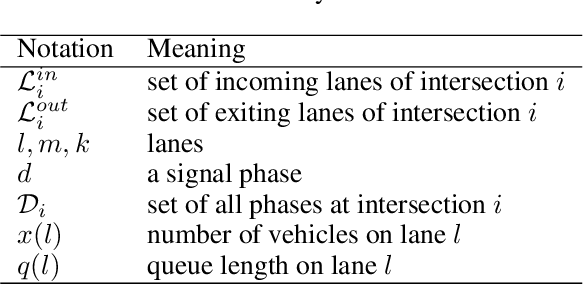
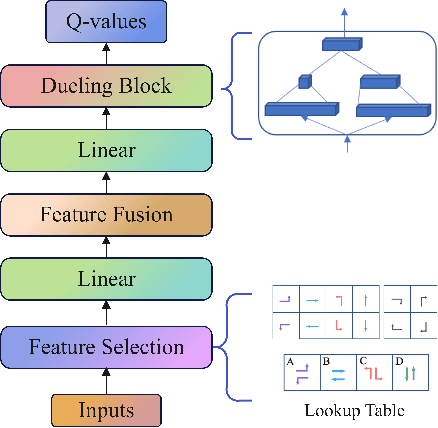
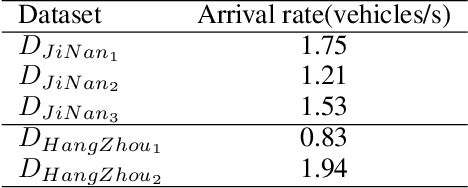
There is a general trend of applying reinforcement learning (RL) techniques for traffic signal control (TSC). Recently, most studies pay attention to the neural network design and rarely concentrate on the state representation. Does the design of state representation has a good impact on TSC? In this paper, we (1) propose an effective state representation as queue length of vehicles with intensive knowledge; (2) present a TSC method called MaxQueue based on our state representation approach; (3) develop a general RL-based TSC template called QL-XLight with queue length as state and reward and generate QL-FRAP, QL-CoLight, and QL-DQN by our QL-XLight template based on traditional and latest RL models.Through comprehensive experiments on multiple real-world datasets, we demonstrate that: (1) our MaxQueue method outperforms the latest RL based methods; (2) QL-FRAP and QL-CoLight achieves a new state-of-the-art (SOTA). In general, state representation with intensive knowledge is also essential for TSC methods. Our code is released on Github.