 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAPEX: Amplitude Anchors and Phase Priors for Target-Scarce Higher-Frequency Wave Prediction
May 26, 2026Learning-based surrogates have become increasingly effective for wave-field prediction, and neural operators in particular have shown strong performance within observed frequency regimes. However, higher-frequency prediction under scarce target supervision remains comparatively underexplored, especially in wave problems where higher-frequency data are substantially more expensive to simulate or measure than lower-frequency data. A central difficulty is that cross-frequency transfer is inherently asymmetric: coarse amplitude structure remains relatively stable across frequencies, whereas phase-sensitive oscillatory structure deteriorates much more rapidly as frequency increases. Motivated by this asymmetry, we propose APEX, Amplitude-anchored and Phase-prior-guided Enhancement from eXtrapolated coarse predictions, a framework for target-scarce higher-frequency wave-field prediction. A lower-frequency neural operator first provides a coarse prediction in the target-frequency regime, from which we retain only the amplitude as a transferable structural anchor. A conditional flow-matching enhancer then reconstructs the target higher-frequency field under the guidance of a Green's-function-inspired phase prior. Experiments on SimpleWave, Helmholtz, and Maxwell benchmarks show that APEX consistently outperforms direct lower-to-higher extrapolation, target-adapted operator, and joint generative baselines under limited target-frequency supervision. Our results suggest that reliable higher-frequency prediction of oscillatory wave fields should not rely on direct end-to-end transfer of the full complex field, but instead on explicitly reusing transferable coarse structure while separately recovering the missing oscillatory detail.
Less Is More: Generating Time Series with LLaMA-Style Autoregression in Simple Factorized Latent Spaces
Nov 07, 2025Generative models for multivariate time series are essential for data augmentation, simulation, and privacy preservation, yet current state-of-the-art diffusion-based approaches are slow and limited to fixed-length windows. We propose FAR-TS, a simple yet effective framework that combines disentangled factorization with an autoregressive Transformer over a discrete, quantized latent space to generate time series. Each time series is decomposed into a data-adaptive basis that captures static cross-channel correlations and temporal coefficients that are vector-quantized into discrete tokens. A LLaMA-style autoregressive Transformer then models these token sequences, enabling fast and controllable generation of sequences with arbitrary length. Owing to its streamlined design, FAR-TS achieves orders-of-magnitude faster generation than Diffusion-TS while preserving cross-channel correlations and an interpretable latent space, enabling high-quality and flexible time series synthesis.
Generalized Temporal Tensor Decomposition with Rank-revealing Latent-ODE
Feb 10, 2025Tensor decomposition is a fundamental tool for analyzing multi-dimensional data by learning low-rank factors to represent high-order interactions. While recent works on temporal tensor decomposition have made significant progress by incorporating continuous timestamps in latent factors, they still struggle with general tensor data with continuous indexes not only in the temporal mode but also in other modes, such as spatial coordinates in climate data. Additionally, the problem of determining the tensor rank remains largely unexplored in temporal tensor models. To address these limitations, we propose \underline{G}eneralized temporal tensor decomposition with \underline{R}ank-r\underline{E}vealing laten\underline{T}-ODE (GRET). Our approach encodes continuous spatial indexes as learnable Fourier features and employs neural ODEs in latent space to learn the temporal trajectories of factors. To automatically reveal the rank of temporal tensors, we introduce a rank-revealing Gaussian-Gamma prior over the factor trajectories. We develop an efficient variational inference scheme with an analytical evidence lower bound, enabling sampling-free optimization. Through extensive experiments on both synthetic and real-world datasets, we demonstrate that GRET not only reveals the underlying ranks of temporal tensors but also significantly outperforms existing methods in prediction performance and robustness against noise.
Striking The Right Balance: Three-Dimensional Ocean Sound Speed Field Reconstruction Using Tensor Neural Networks
Aug 09, 2023Accurately reconstructing a three-dimensional ocean sound speed field (3D SSF) is essential for various ocean acoustic applications, but the sparsity and uncertainty of sound speed samples across a vast ocean region make it a challenging task. To tackle this challenge, a large body of reconstruction methods has been developed, including spline interpolation, matrix/tensor-based completion, and deep neural networks-based reconstruction. However, a principled analysis of their effectiveness in 3D SSF reconstruction is still lacking. This paper performs a thorough analysis of the reconstruction error and highlights the need for a balanced representation model that integrates both expressiveness and conciseness. To meet this requirement, a 3D SSF-tailored tensor deep neural network is proposed, which utilizes tensor computations and deep neural network architectures to achieve remarkable 3D SSF reconstruction. The proposed model not only includes the previous tensor-based SSF representation model as a special case, but also has a natural ability to reject noise. The numerical results using the South China Sea 3D SSF data demonstrate that the proposed method outperforms state-of-the-art methods. The code is available at https://github.com/OceanSTARLab/Tensor-Neural-Network.
Tensor-based Basis Function Learning for Three-dimensional Sound Speed Fields
Jan 21, 2022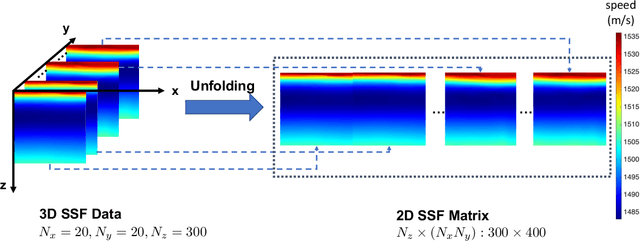
Basis function learning is the stepping stone towards effective three-dimensional (3D) sound speed field (SSF) inversion for various acoustic signal processing tasks, including ocean acoustic tomography, underwater target localization/tracking, and underwater communications. Classical basis functions include the empirical orthogonal functions (EOFs), Fourier basis functions, and their combinations. The unsupervised machine learning method, e.g., the K-SVD algorithm, has recently tapped into the basis function design, showing better representation performance than the EOFs. However, existing methods do not consider basis function learning approaches that treat 3D SSF data as a third-order tensor, and thus cannot fully utilize the 3D interactions/correlations therein. To circumvent such a drawback, basis function learning is linked to tensor decomposition in this paper, which is the primary drive for recent multi-dimensional data mining. In particular, a tensor-based basis function learning framework is proposed, which can include the classical basis functions (using EOFs and/or Fourier basis functions) as its special cases. This provides a unified tensor perspective for understanding and representing 3D SSFs. Numerical results using the South China Sea 3D SSF data have demonstrated the excellent performance of the tensor-based basis functions.