 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCertifiable Relative Pose Estimation
Mar 30, 2020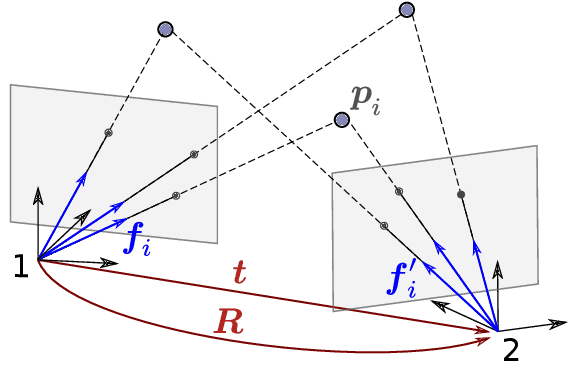

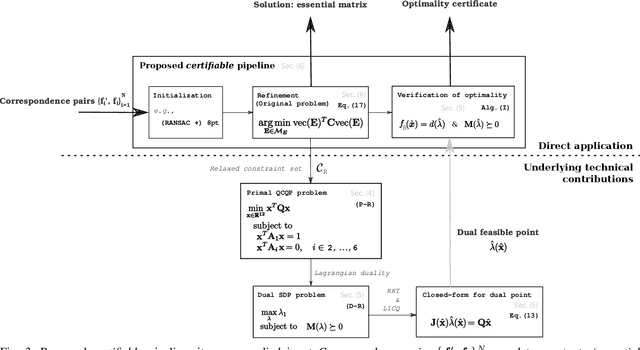
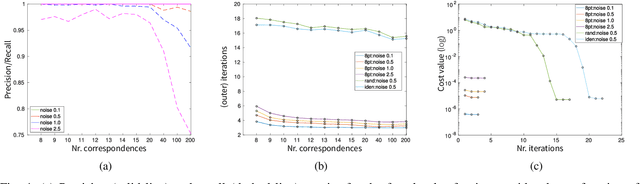
In this paper we present the first fast optimality certifier for the non-minimal version of the Relative Pose problem for calibrated cameras from epipolar constraints. The proposed certifier is based on Lagrangian duality and relies on a novel closed-form expression for dual points. We also leverage an efficient solver that performs local optimization on the manifold of the original problem's non-convex domain. The optimality of the solution is then checked via our novel fast certifier. The extensive conducted experiments demonstrate that, despite its simplicity, this certifiable solver performs excellently on synthetic data, repeatedly attaining the (certified \textit{a posteriori}) optimal solution and shows a satisfactory performance on real data.
The Replica Dataset: A Digital Replica of Indoor Spaces
Jun 13, 2019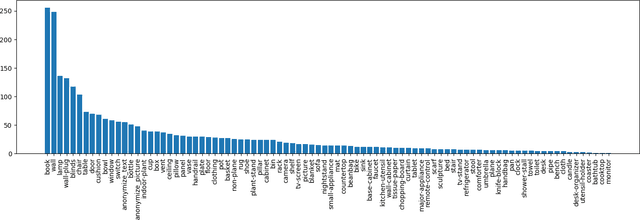



We introduce Replica, a dataset of 18 highly photo-realistic 3D indoor scene reconstructions at room and building scale. Each scene consists of a dense mesh, high-resolution high-dynamic-range (HDR) textures, per-primitive semantic class and instance information, and planar mirror and glass reflectors. The goal of Replica is to enable machine learning (ML) research that relies on visually, geometrically, and semantically realistic generative models of the world - for instance, egocentric computer vision, semantic segmentation in 2D and 3D, geometric inference, and the development of embodied agents (virtual robots) performing navigation, instruction following, and question answering. Due to the high level of realism of the renderings from Replica, there is hope that ML systems trained on Replica may transfer directly to real world image and video data. Together with the data, we are releasing a minimal C++ SDK as a starting point for working with the Replica dataset. In addition, Replica is `Habitat-compatible', i.e. can be natively used with AI Habitat for training and testing embodied agents.