 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA minimum swept-volume metric structure for configuration space
Nov 21, 2022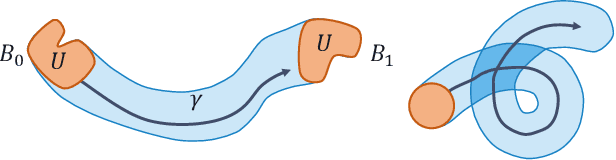
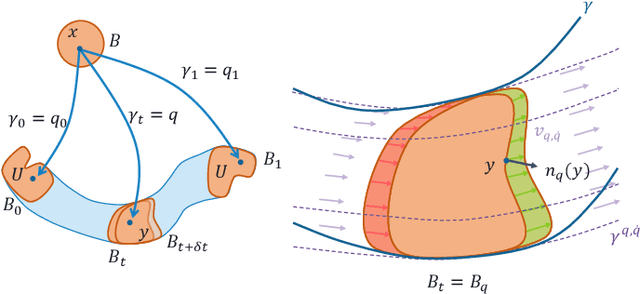
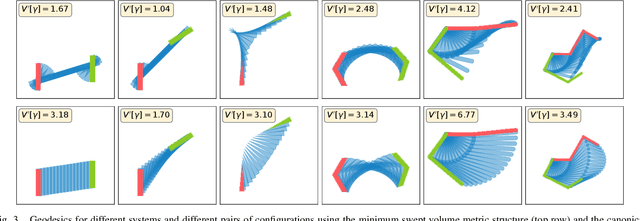
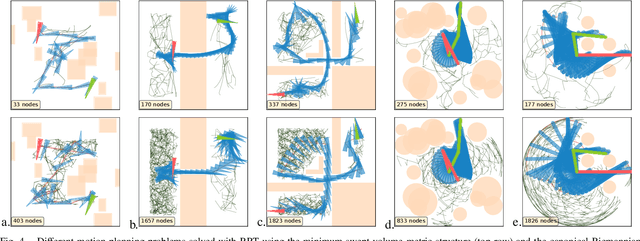
Borrowing elementary ideas from solid mechanics and differential geometry, this presentation shows that the volume swept by a regular solid undergoing a wide class of volume-preserving deformations induces a rather natural metric structure with well-defined and computable geodesics on its configuration space. This general result applies to concrete classes of articulated objects such as robot manipulators, and we demonstrate as a proof of concept the computation of geodesic paths for a free flying rod and planar robotic arms as well as their use in path planning with many obstacles.
On the mechanical contribution of head stabilization to passive dynamics of anthropometric walkers
Oct 29, 2020



During the steady gait, humans stabilize their head around the vertical orientation. While there are sensori-cognitive explanations for this phenomenon, its mechanical e fect on the body dynamics remains un-explored. In this study, we take profit from the similarities that human steady gait share with the locomotion of passive dynamics robots. We introduce a simplified anthropometric D model to reproduce a broad walking dynamics. In a previous study, we showed heuristically that the presence of a stabilized head-neck system significantly influences the dynamics of walking. This paper gives new insights that lead to understanding this mechanical e fect. In particular, we introduce an original cart upper-body model that allows to better understand the mechanical interest of head stabilization when walking, and we study how this e fect is sensitive to the choice of control parameters.
Learning Obstacle Representations for Neural Motion Planning
Aug 29, 2020
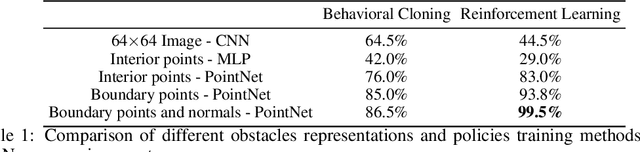
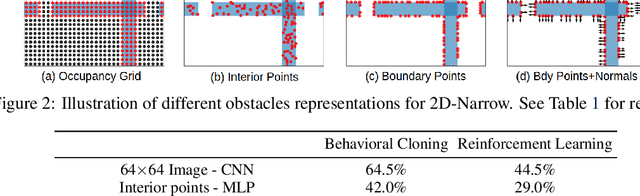
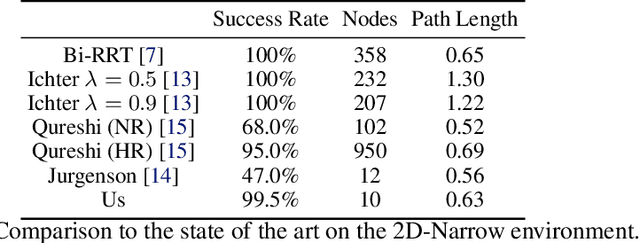
Motion planning and obstacle avoidance is a key challenge in robotics applications. While previous work succeeds to provide excellent solutions for known environments, sensor-based motion planning in new and dynamic environments remains difficult. In this work we address sensor-based motion planning from a learning perspective. Motivated by recent advances in visual recognition, we argue the importance of learning appropriate representations for motion planning. We propose a new obstacle representation based on the PointNet architecture and train it jointly with policies for obstacle avoidance. We experimentally evaluate our approach for rigid body motion planning in challenging environments and demonstrate significant improvements of the state of the art in terms of accuracy and efficiency.
Decidability in Robot Manipulation Planning
Nov 08, 2018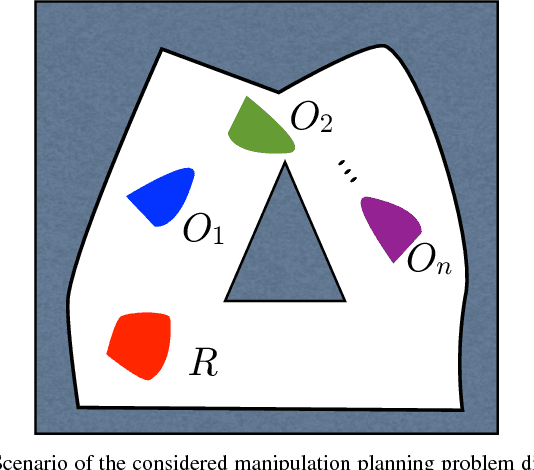
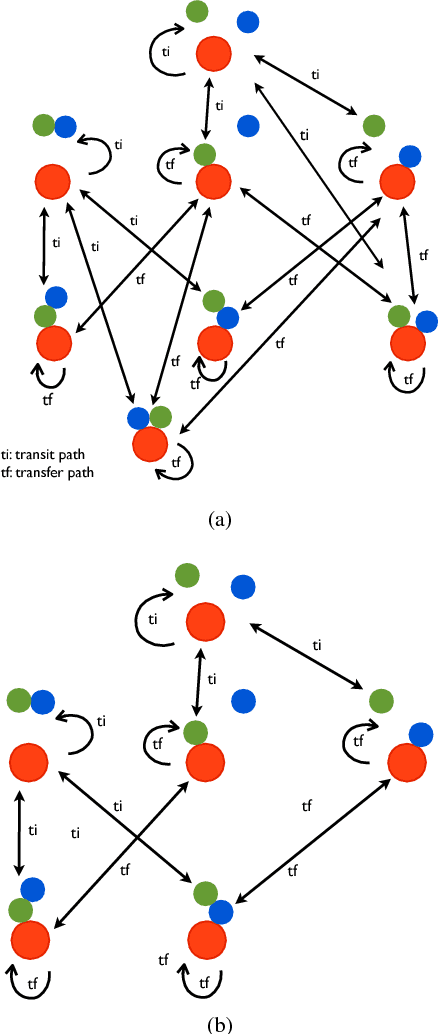
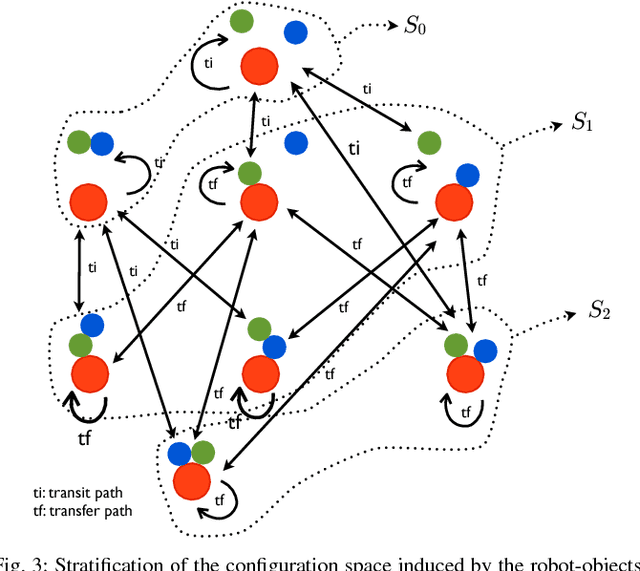
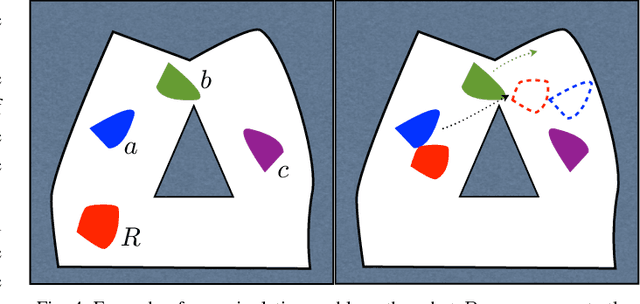
Consider the problem of planning collision-free motion of $n$ objects in the plane movable through contact with a robot that can autonomously translate in the plane and that can move a maximum of $m \leq n$ objects simultaneously. This represents the abstract formulation of a manipulation planning problem that is proven to be decidable in this paper. The tools used for proving decidability of this simplified manipulation planning problem are, in fact, general enough to handle the decidability problem for the wider class of systems characterized by a stratified configuration space. These include, for example, problems of legged and multi-contact locomotion, bi-manual manipulation. In addition, the described approach does not restrict the dynamics of the manipulation system to be considered.
Grasping versus Knitting: a Geometric Perspective
Apr 28, 2016Grasping an object is a matter of first moving a prehensile organ at some position in the world, and then managing the contact relationship between the prehensile organ and the object. Once the contact relationship has been established and made stable, the object is part of the body and it can move in the world. As any action, the action of grasping is ontologically anchored in the physical space while the correlative movement originates in the space of the body. Evolution has found amazing solutions that allow organisms to rapidly and efficiently manage the relationship between their body and the world. It is then natural that roboticists consider taking inspiration of these natural solutions, while contributing to better understand their origin.