Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA minimum swept-volume metric structure for configuration space
Paper and Code
Nov 21, 2022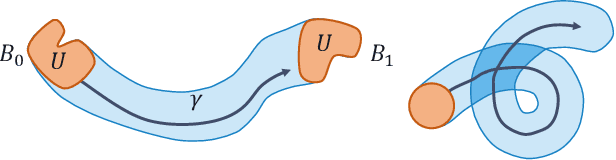
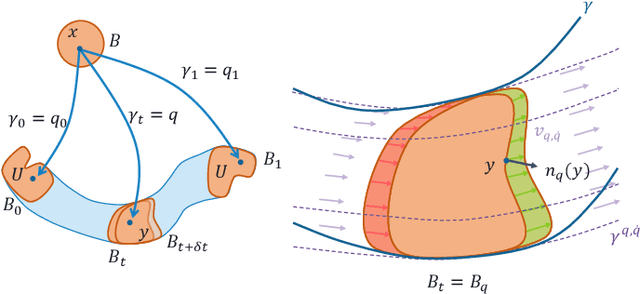
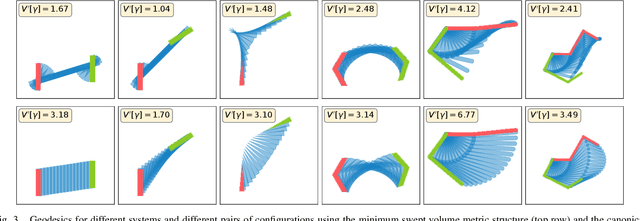
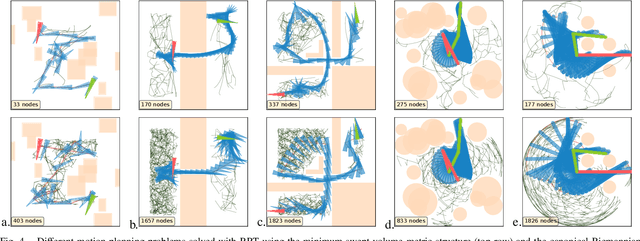
Borrowing elementary ideas from solid mechanics and differential geometry, this presentation shows that the volume swept by a regular solid undergoing a wide class of volume-preserving deformations induces a rather natural metric structure with well-defined and computable geodesics on its configuration space. This general result applies to concrete classes of articulated objects such as robot manipulators, and we demonstrate as a proof of concept the computation of geodesic paths for a free flying rod and planar robotic arms as well as their use in path planning with many obstacles.
View paper on