 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDemonstrating Performance Benefits of Human-Swarm Teaming
Mar 23, 2023

Autonomous swarms of robots can bring robustness, scalability and adaptability to safety-critical tasks such as search and rescue but their application is still very limited. Using semi-autonomous swarms with human control can bring robot swarms to real-world applications. Human operators can define goals for the swarm, monitor their performance and interfere with, or overrule, the decisions and behaviour. We present the ``Human And Robot Interactive Swarm'' simulator (HARIS) that allows multi-user interaction with a robot swarm and facilitates qualitative and quantitative user studies through simulation of robot swarms completing tasks, from package delivery to search and rescue, with varying levels of human control. In this demonstration, we showcase the simulator by using it to study the performance gain offered by maintaining a ``human-in-the-loop'' over a fully autonomous system as an example. This is illustrated in the context of search and rescue, with an autonomous allocation of resources to those in need.
On the Opportunities and Risks of Foundation Models
Aug 18, 2021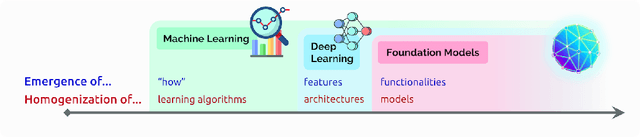
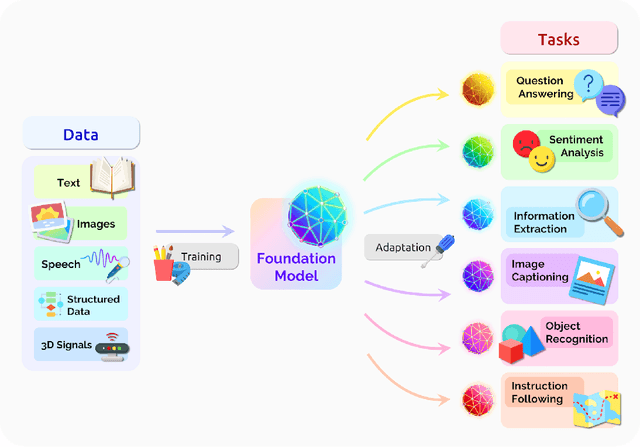
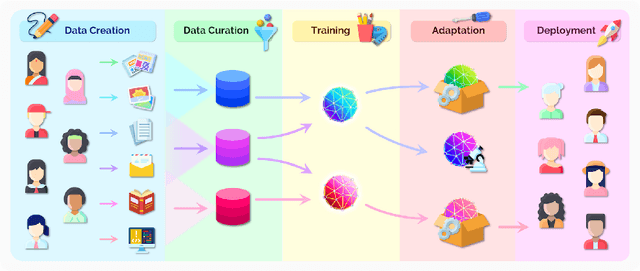
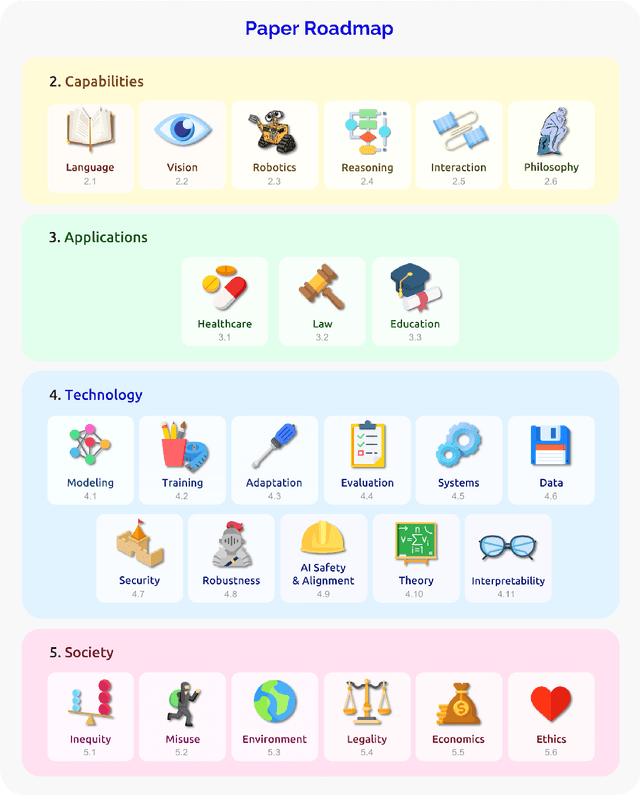
AI is undergoing a paradigm shift with the rise of models (e.g., BERT, DALL-E, GPT-3) that are trained on broad data at scale and are adaptable to a wide range of downstream tasks. We call these models foundation models to underscore their critically central yet incomplete character. This report provides a thorough account of the opportunities and risks of foundation models, ranging from their capabilities (e.g., language, vision, robotics, reasoning, human interaction) and technical principles(e.g., model architectures, training procedures, data, systems, security, evaluation, theory) to their applications (e.g., law, healthcare, education) and societal impact (e.g., inequity, misuse, economic and environmental impact, legal and ethical considerations). Though foundation models are based on standard deep learning and transfer learning, their scale results in new emergent capabilities,and their effectiveness across so many tasks incentivizes homogenization. Homogenization provides powerful leverage but demands caution, as the defects of the foundation model are inherited by all the adapted models downstream. Despite the impending widespread deployment of foundation models, we currently lack a clear understanding of how they work, when they fail, and what they are even capable of due to their emergent properties. To tackle these questions, we believe much of the critical research on foundation models will require deep interdisciplinary collaboration commensurate with their fundamentally sociotechnical nature.