 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeyond RMSE: Do machine-learned models of road user interaction produce human-like behavior?
Jun 22, 2022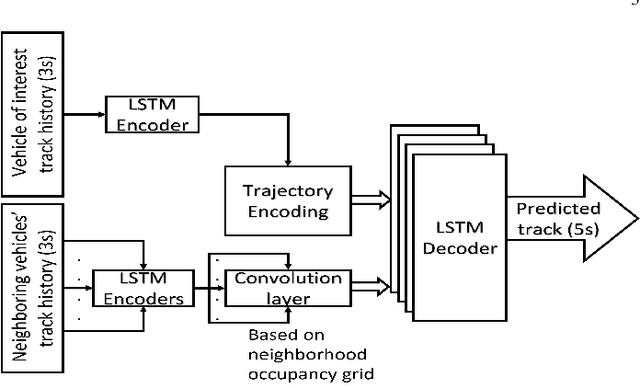
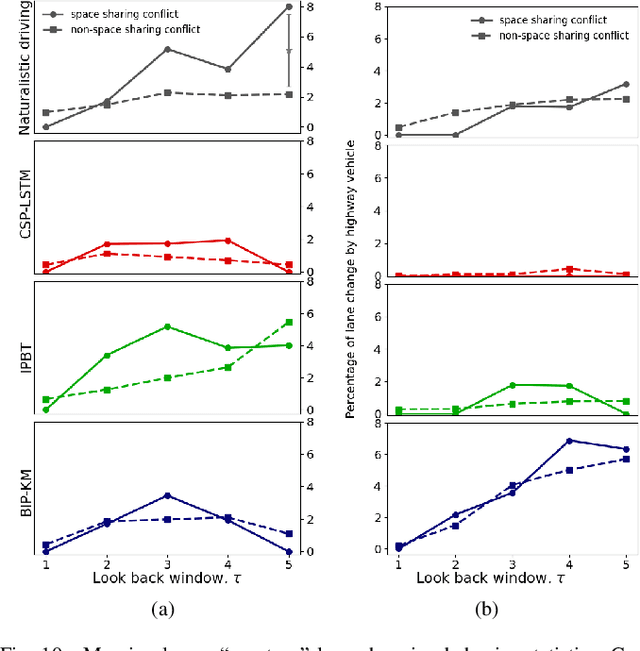
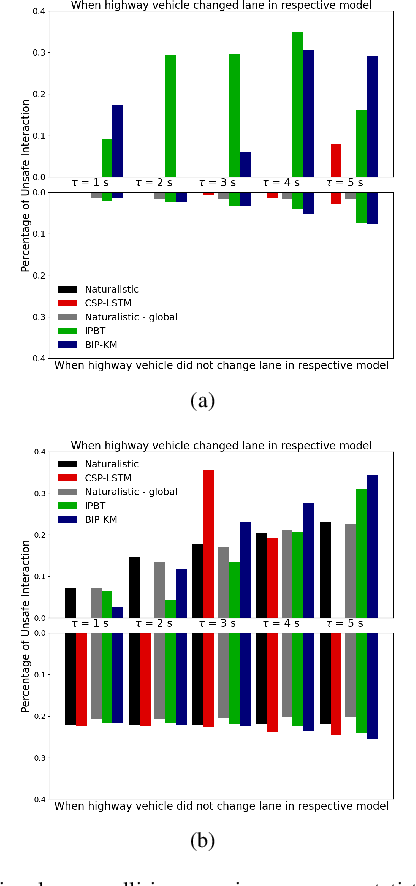
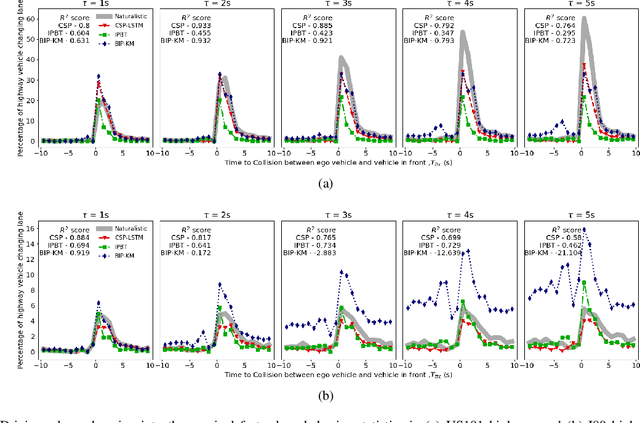
Autonomous vehicles use a variety of sensors and machine-learned models to predict the behavior of surrounding road users. Most of the machine-learned models in the literature focus on quantitative error metrics like the root mean square error (RMSE) to learn and report their models' capabilities. This focus on quantitative error metrics tends to ignore the more important behavioral aspect of the models, raising the question of whether these models really predict human-like behavior. Thus, we propose to analyze the output of machine-learned models much like we would analyze human data in conventional behavioral research. We introduce quantitative metrics to demonstrate presence of three different behavioral phenomena in a naturalistic highway driving dataset: 1) The kinematics-dependence of who passes a merging point first 2) Lane change by an on-highway vehicle to accommodate an on-ramp vehicle 3) Lane changes by vehicles on the highway to avoid lead vehicle conflicts. Then, we analyze the behavior of three machine-learned models using the same metrics. Even though the models' RMSE value differed, all the models captured the kinematic-dependent merging behavior but struggled at varying degrees to capture the more nuanced courtesy lane change and highway lane change behavior. Additionally, the collision aversion analysis during lane changes showed that the models struggled to capture the physical aspect of human driving: leaving adequate gap between the vehicles. Thus, our analysis highlighted the inadequacy of simple quantitative metrics and the need to take a broader behavioral perspective when analyzing machine-learned models of human driving predictions.
A Utility Maximization Model of Pedestrian and Driver Interactions
Oct 21, 2021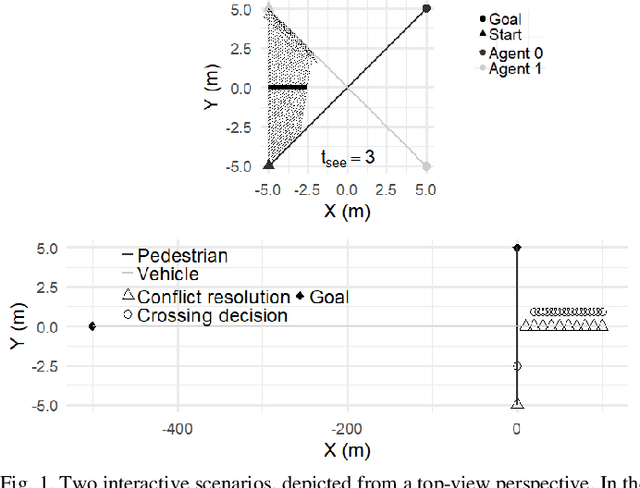
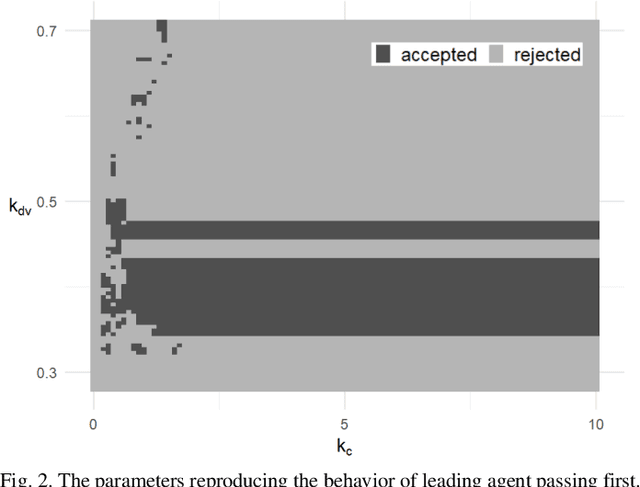
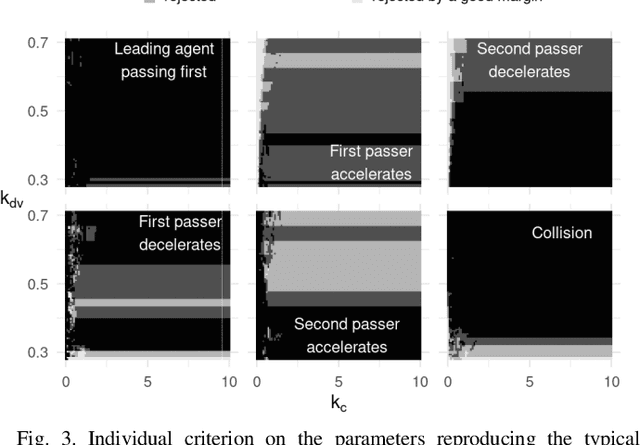
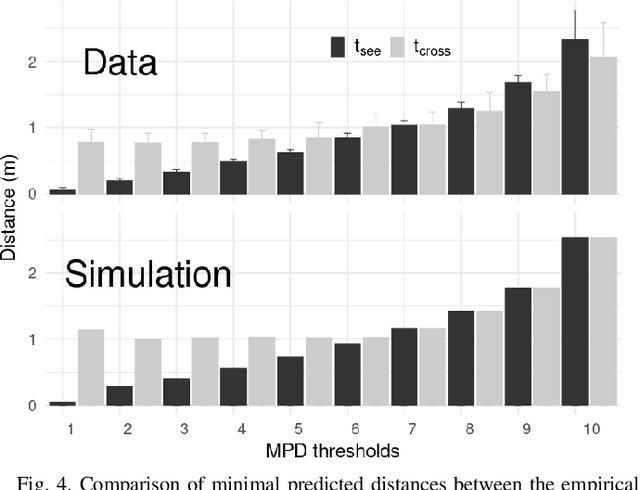
Many models account for the traffic flow of road users but few take the details of local interactions into consideration and how they could deteriorate into safety-critical situations. Building on the concept of sensorimotor control, we develop a modeling framework applying the principles of utility maximization, motor primitives, and intermittent action decisions to account for the details of interactive behaviors among road users. The framework connects these principles to the decision theory and is applied to determine whether such an approach can reproduce the following phenomena: When two pedestrians travel on crossing paths, (a) their interaction is sensitive to initial asymmetries, and (b) based on which, they rapidly resolve collision conflict by adapting their behaviors. When a pedestrian crosses the road while facing an approaching car, (c) either road user yields to the other to resolve their conflict, akin to the pedestrian interaction, and (d) the outcome reveals a specific situational kinematics, associated with the nature of vehicle acceleration. We show that these phenomena emerge naturally from our modeling framework when the model can evolve its parameters as a consequence of the situations. We believe that the modeling framework and phenomenon-centered analysis offer promising tools to understand road user interactions. We conclude with a discussion on how the model can be instrumental in studying the safety-critical situations when including other variables in road-user interactions.
Comparing merging behaviors observed in naturalistic data with behaviors generated by a machine learned model
Apr 21, 2021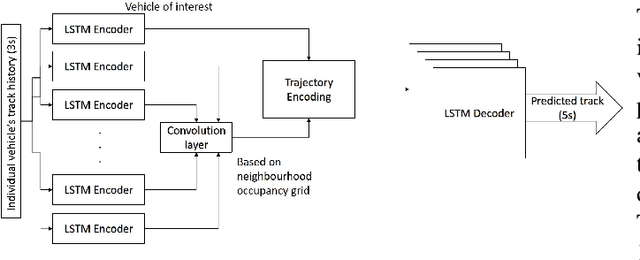
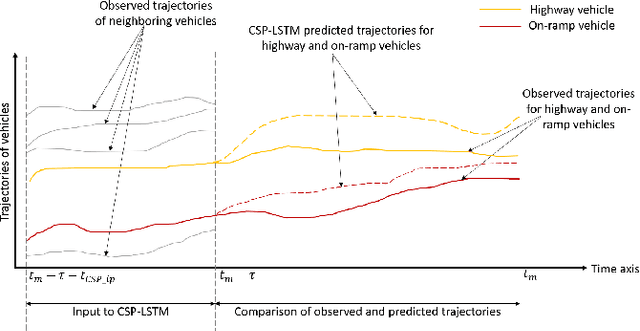
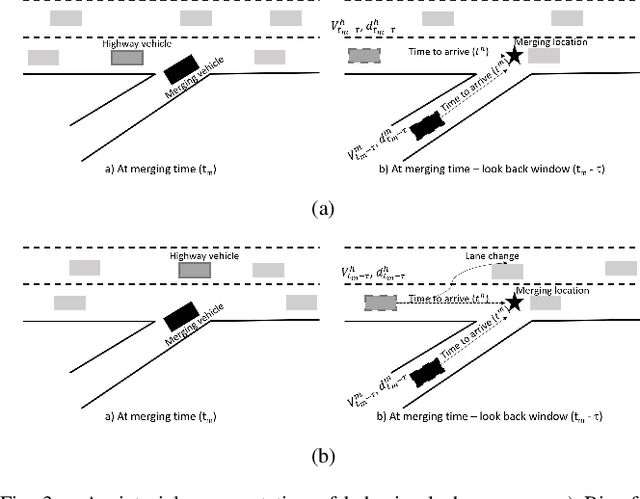
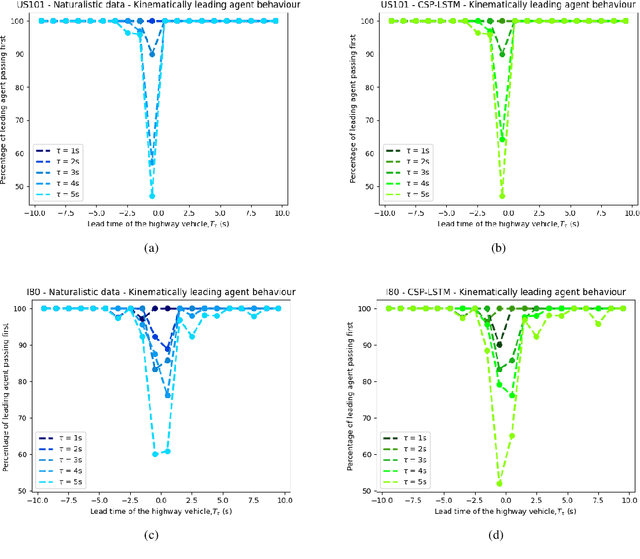
There is quickly growing literature on machine-learned models that predict human driving trajectories in road traffic. These models focus their learning on low-dimensional error metrics, for example average distance between model-generated and observed trajectories. Such metrics permit relative comparison of models, but do not provide clearly interpretable information on how close to human behavior the models actually come, for example in terms of higher-level behavior phenomena that are known to be present in human driving. We study highway driving as an example scenario, and introduce metrics to quantitatively demonstrate the presence, in a naturalistic dataset, of two familiar behavioral phenomena: (1) The kinematics-dependent contest, between on-highway and on-ramp vehicles, of who passes the merging point first. (2) Courtesy lane changes away from the outermost lane, to leave space for a merging vehicle. Applying the exact same metrics to the output of a state-of-the-art machine-learned model, we show that the model is capable of reproducing the former phenomenon, but not the latter. We argue that this type of behavioral analysis provides information that is not available from conventional model-fitting metrics, and that it may be useful to analyze (and possibly fit) models also based on these types of behavioral criteria.