 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeActive Inference in Hebbian Learning Networks
Jun 22, 2023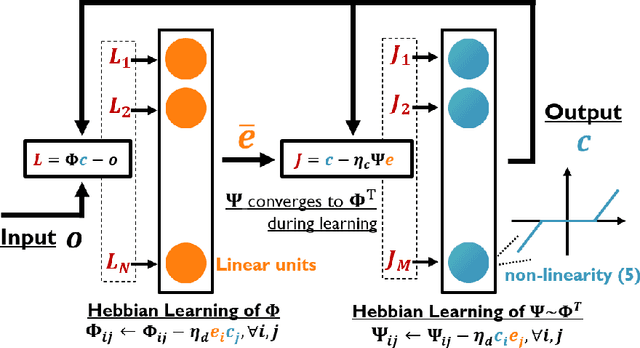
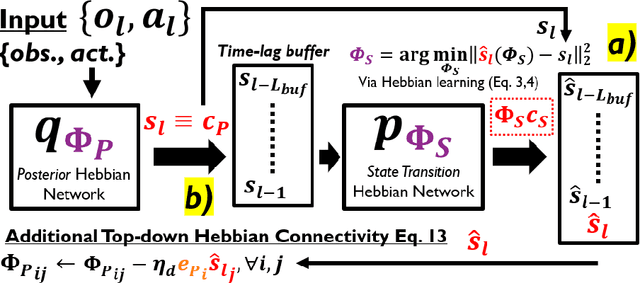
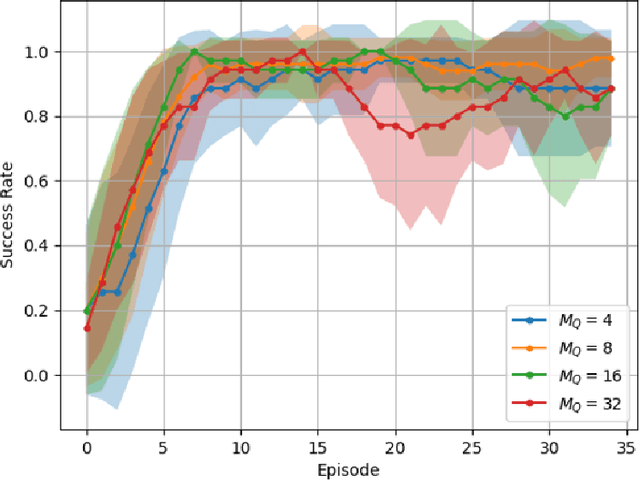
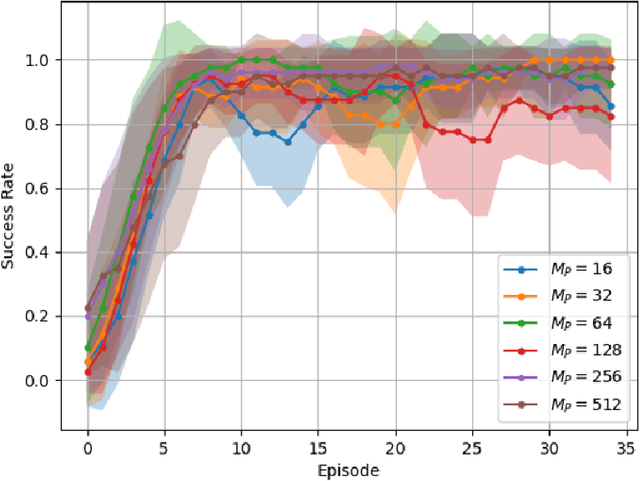
This work studies how brain-inspired neural ensembles equipped with local Hebbian plasticity can perform active inference (AIF) in order to control dynamical agents. A generative model capturing the environment dynamics is learned by a network composed of two distinct Hebbian ensembles: a posterior network, which infers latent states given the observations, and a state transition network, which predicts the next expected latent state given current state-action pairs. Experimental studies are conducted using the Mountain Car environment from the OpenAI gym suite, to study the effect of the various Hebbian network parameters on the task performance. It is shown that the proposed Hebbian AIF approach outperforms the use of Q-learning, while not requiring any replay buffer, as in typical reinforcement learning systems. These results motivate further investigations of Hebbian learning for the design of AIF networks that can learn environment dynamics without the need for revisiting past buffered experiences.
Fusing Event-based Camera and Radar for SLAM Using Spiking Neural Networks with Continual STDP Learning
Oct 09, 2022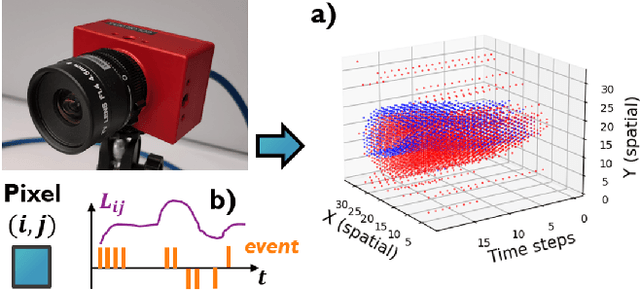
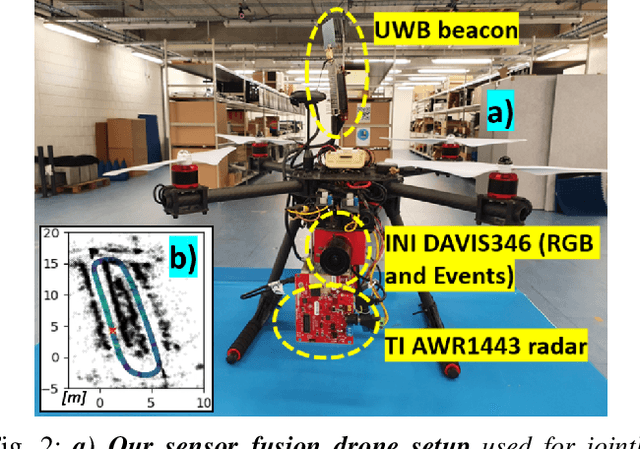
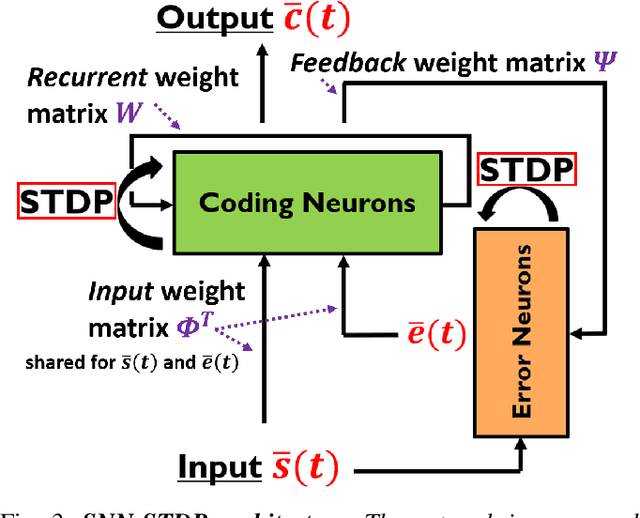
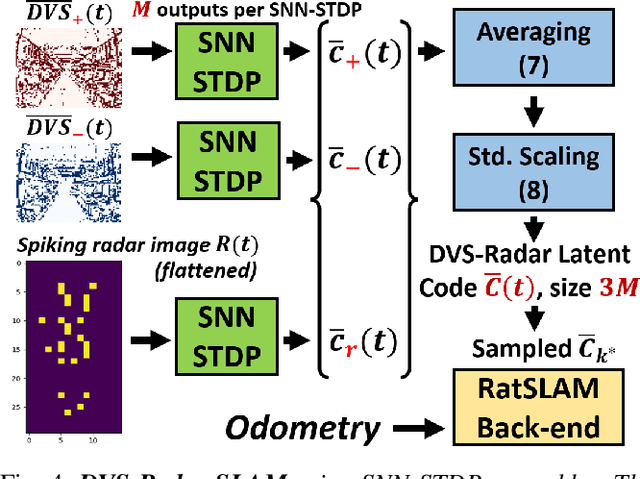
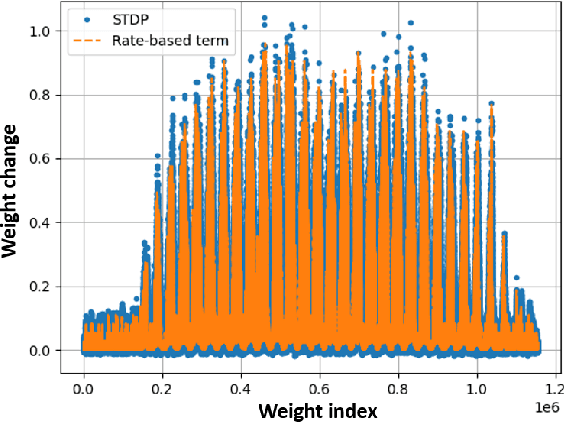
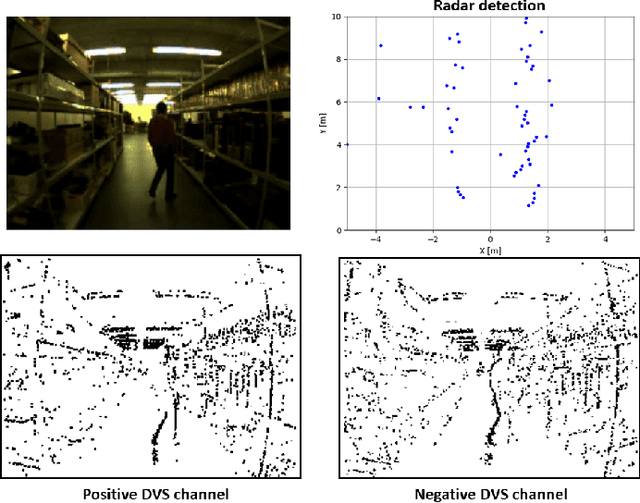
This work proposes a first-of-its-kind SLAM architecture fusing an event-based camera and a Frequency Modulated Continuous Wave (FMCW) radar for drone navigation. Each sensor is processed by a bio-inspired Spiking Neural Network (SNN) with continual Spike-Timing-Dependent Plasticity (STDP) learning, as observed in the brain. In contrast to most learning-based SLAM systems%, which a) require the acquisition of a representative dataset of the environment in which navigation must be performed and b) require an off-line training phase, our method does not require any offline training phase, but rather the SNN continuously learns features from the input data on the fly via STDP. At the same time, the SNN outputs are used as feature descriptors for loop closure detection and map correction. We conduct numerous experiments to benchmark our system against state-of-the-art RGB methods and we demonstrate the robustness of our DVS-Radar SLAM approach under strong lighting variations.
Learning to SLAM on the Fly in Unknown Environments: A Continual Learning Approach for Drones in Visually Ambiguous Scenes
Aug 27, 2022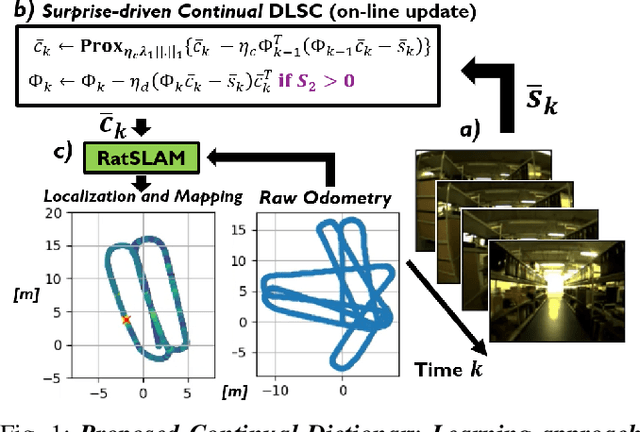
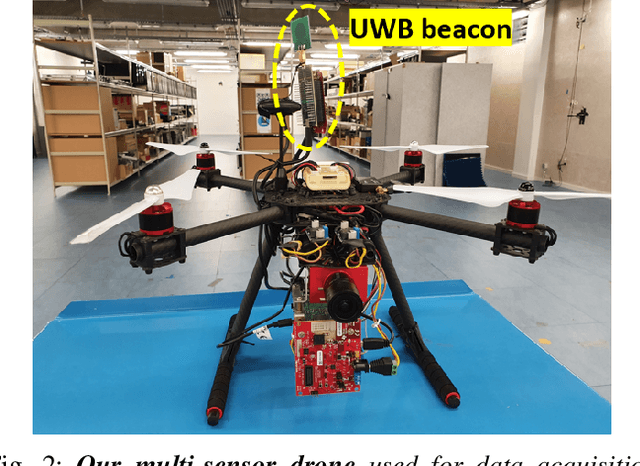
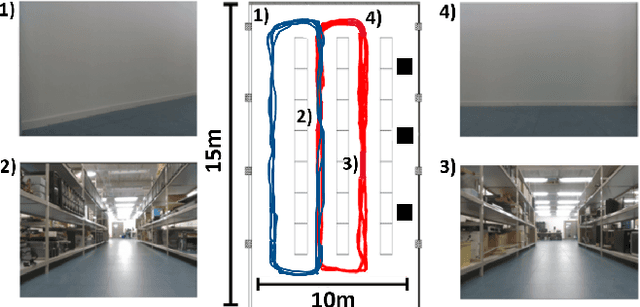
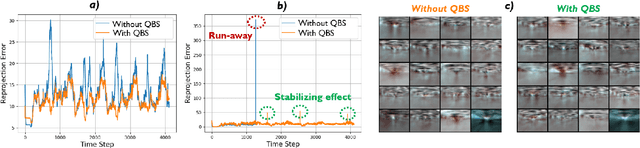
Learning to safely navigate in unknown environments is an important task for autonomous drones used in surveillance and rescue operations. In recent years, a number of learning-based Simultaneous Localisation and Mapping (SLAM) systems relying on deep neural networks (DNNs) have been proposed for applications where conventional feature descriptors do not perform well. However, such learning-based SLAM systems rely on DNN feature encoders trained offline in typical deep learning settings. This makes them less suited for drones deployed in environments unseen during training, where continual adaptation is paramount. In this paper, we present a new method for learning to SLAM on the fly in unknown environments, by modulating a low-complexity Dictionary Learning and Sparse Coding (DLSC) pipeline with a newly proposed Quadratic Bayesian Surprise (QBS) factor. We experimentally validate our approach with data collected by a drone in a challenging warehouse scenario, where the high number of ambiguous scenes makes visual disambiguation hard.
Continuously Learning to Detect People on the Fly: A Bio-inspired Visual System for Drones
Feb 20, 2022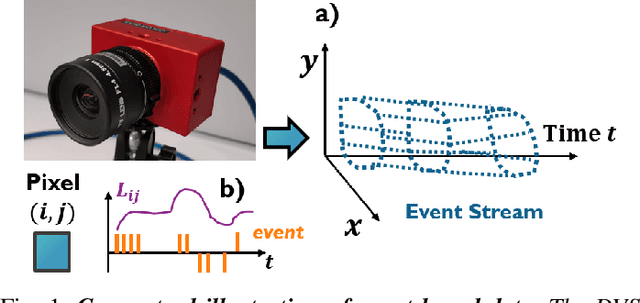
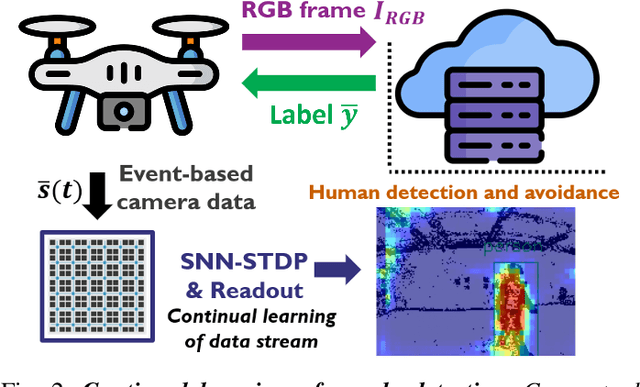
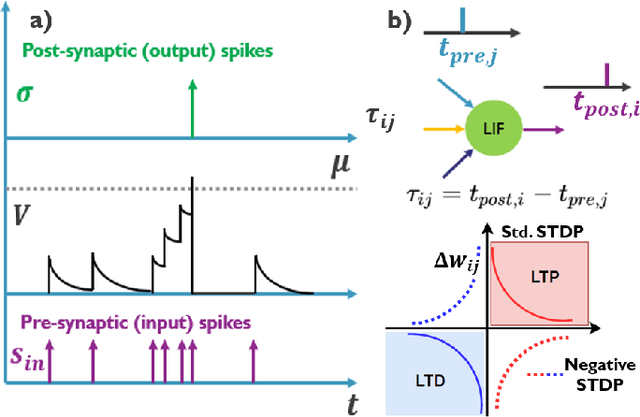
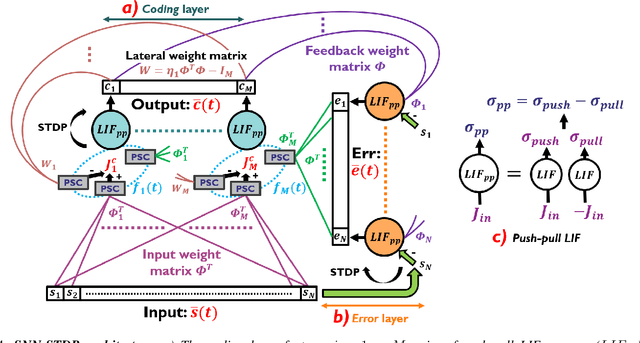
This paper demonstrates for the first time that a biologically-plausible spiking neural network (SNN) equipped with Spike-Timing-Dependent Plasticity (STDP) can continuously learn to detect walking people on the fly using retina-inspired, event-based cameras. Our pipeline works as follows. First, a short sequence of event data ($<2$ minutes), capturing a walking human by a flying drone, is forwarded to a convolutional SNNSTDP system which also receives teacher spiking signals from a readout (forming a semi-supervised system). Then, STDP adaptation is stopped and the learned system is assessed on testing sequences. We conduct several experiments to study the effect of key parameters in our system and to compare it against conventionally-trained CNNs. We show that our system reaches a higher peak $F_1$ score (+19%) compared to CNNs with event-based camera frames, while enabling on-line adaptation.
Learning Event-based Spatio-Temporal Feature Descriptors via Local Synaptic Plasticity: A Biologically-realistic Perspective of Computer Vision
Nov 04, 2021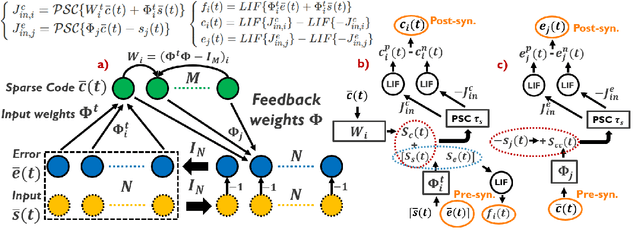

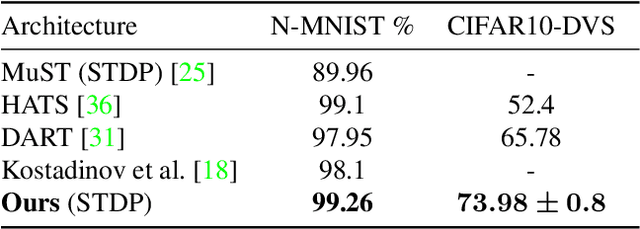
We present an optimization-based theory describing spiking cortical ensembles equipped with Spike-Timing-Dependent Plasticity (STDP) learning, as empirically observed in the visual cortex. Using our methods, we build a class of fully-connected, convolutional and action-based feature descriptors for event-based camera that we respectively assess on N-MNIST, challenging CIFAR10-DVS and on the IBM DVS128 gesture dataset. We report significant accuracy improvements compared to conventional state-of-the-art event-based feature descriptors (+8% on CIFAR10-DVS). We report large improvements in accuracy compared to state-of-the-art STDP-based systems (+10% on N-MNIST, +7.74% on IBM DVS128 Gesture). In addition to ultra-low-power learning in neuromorphic edge devices, our work helps paving the way towards a biologically-realistic, optimization-based theory of cortical vision.
Fail-Safe Human Detection for Drones Using a Multi-Modal Curriculum Learning Approach
Sep 28, 2021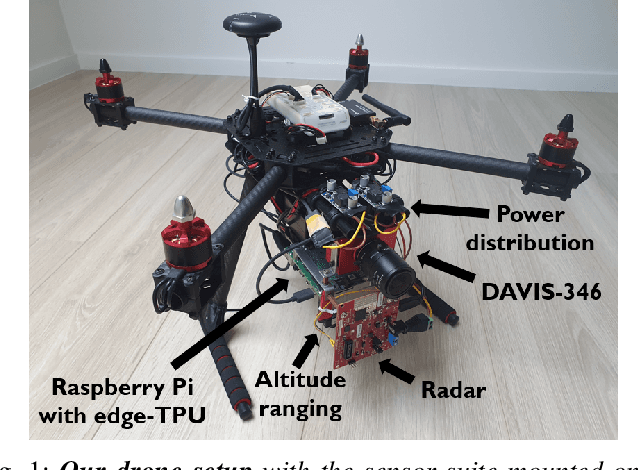
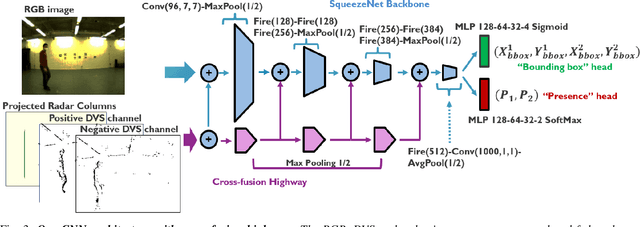
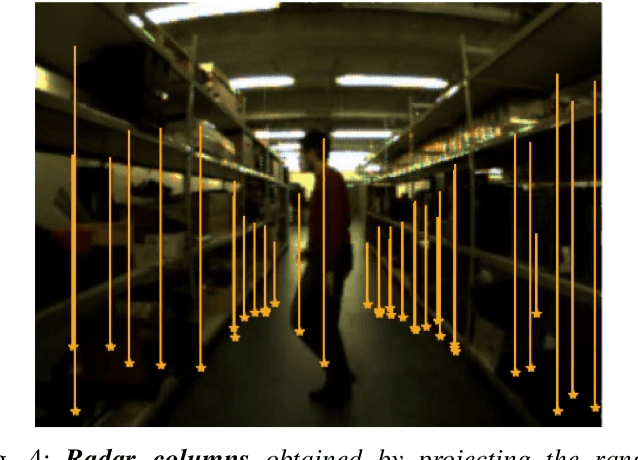
Drones are currently being explored for safety-critical applications where human agents are expected to evolve in their vicinity. In such applications, robust people avoidance must be provided by fusing a number of sensing modalities in order to avoid collisions. Currently however, people detection systems used on drones are solely based on standard cameras besides an emerging number of works discussing the fusion of imaging and event-based cameras. On the other hand, radar-based systems provide up-most robustness towards environmental conditions but do not provide complete information on their own and have mainly been investigated in automotive contexts, not for drones. In order to enable the fusion of radars with both event-based and standard cameras, we present KUL-UAVSAFE, a first-of-its-kind dataset for the study of safety-critical people detection by drones. In addition, we propose a baseline CNN architecture with cross-fusion highways and introduce a curriculum learning strategy for multi-modal data termed SAUL, which greatly enhances the robustness of the system towards hard RGB failures and provides a significant gain of 15% in peak F1 score compared to the use of BlackIn, previously proposed for cross-fusion networks. We demonstrate the real-time performance and feasibility of the approach by implementing the system in an edge-computing unit. We release our dataset and additional material in the project home page.
A 2-$μ$J, 12-class, 91% Accuracy Spiking Neural Network Approach For Radar Gesture Recognition
Aug 24, 2021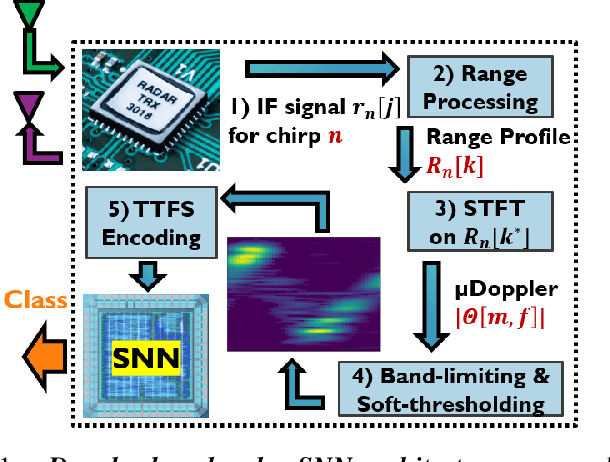
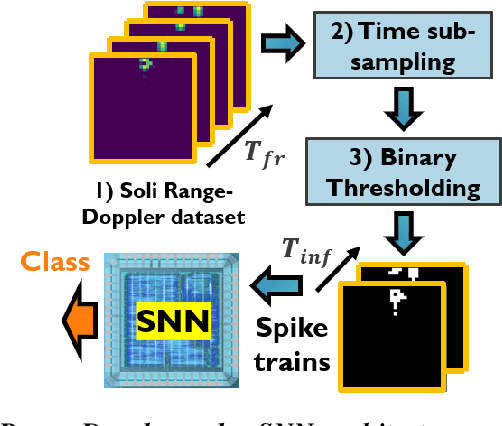

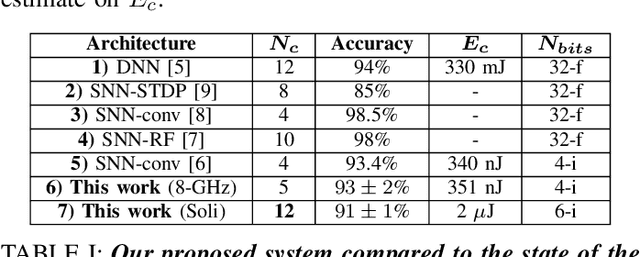
Radar processing via spiking neural networks (SNNs) has recently emerged as a solution in the field of ultra-low-power wireless human-computer interaction. Compared to traditional energy- and area-hungry deep learning methods, SNNs are significantly more energy efficient and can be deployed in the growing number of compact SNN accelerator chips, making them a better solution for ubiquitous IoT applications. We propose a novel SNN strategy for radar gesture recognition, achieving more than 91% of accuracy on two different radar datasets. Our work significantly differs from previous approaches as 1) we use a novel radar-SNN training strategy, 2) we use quantized weights, enabling power-efficient implementation in real-world SNN hardware, and 3) we report the SNN energy consumption per classification, clearly demonstrating the real-world feasibility and power savings induced by SNN-based radar processing. We release evaluation code to help future research.
A Low-Complexity Radar Detector Outperforming OS-CFAR for Indoor Drone Obstacle Avoidance
Jul 15, 2021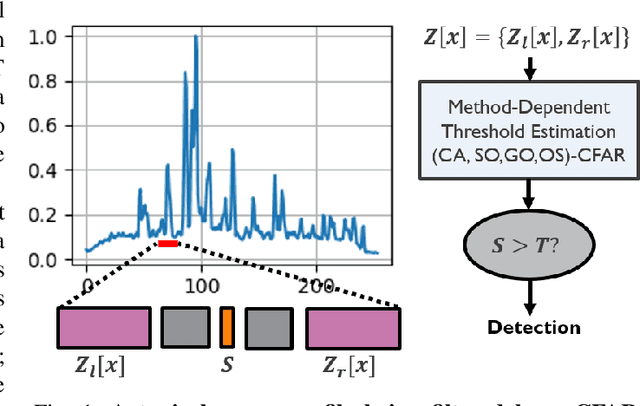
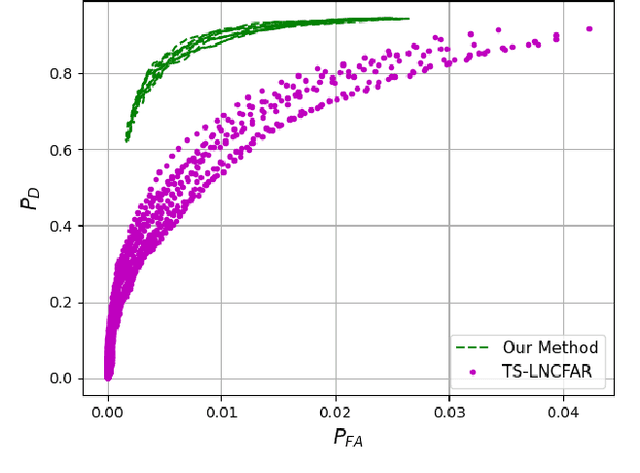
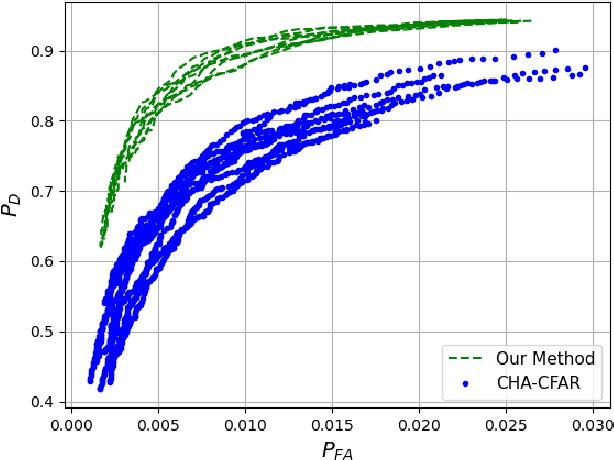
As radar sensors are being miniaturized, there is a growing interest for using them in indoor sensing applications such as indoor drone obstacle avoidance. In those novel scenarios, radars must perform well in dense scenes with a large number of neighboring scatterers. Central to radar performance is the detection algorithm used to separate targets from the background noise and clutter. Traditionally, most radar systems use conventional CFAR detectors but their performance degrades in indoor scenarios with many reflectors. Inspired by the advances in non-linear target detection, we propose a novel high-performance, yet low-complexity target detector and we experimentally validate our algorithm on a dataset acquired using a radar mounted on a drone. We experimentally show that our proposed algorithm drastically outperforms OS-CFAR (standard detector used in automotive systems) for our specific task of indoor drone navigation with more than 19% higher probability of detection for a given probability of false alarm. We also benchmark our proposed detector against a number of recently proposed multi-target CFAR detectors and show an improvement of 16% in probability of detection compared to CHA-CFAR, with even larger improvements compared to both OR-CFAR and TS-LNCFAR in our particular indoor scenario. To the best of our knowledge, this work improves the state of the art for high-performance yet low-complexity radar detection in critical indoor sensing applications.