 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFusing Event-based Camera and Radar for SLAM Using Spiking Neural Networks with Continual STDP Learning
Paper and Code
Oct 09, 2022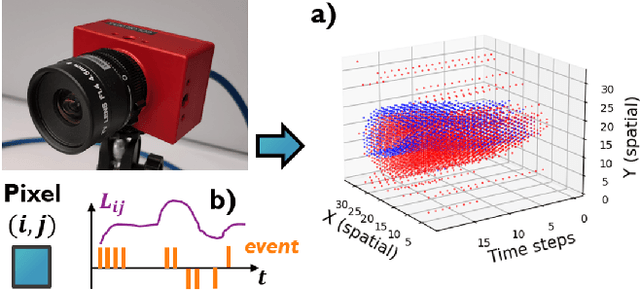
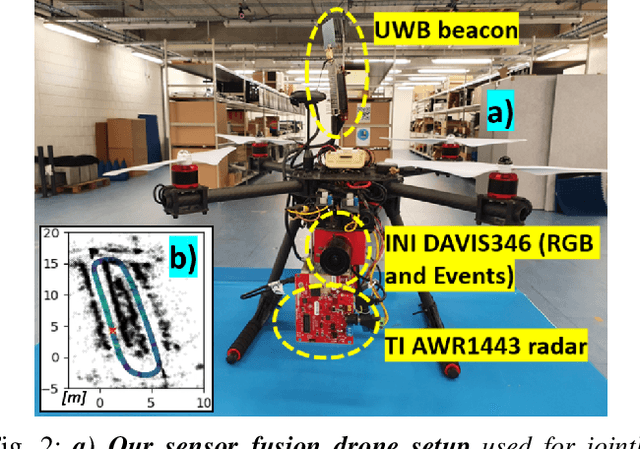
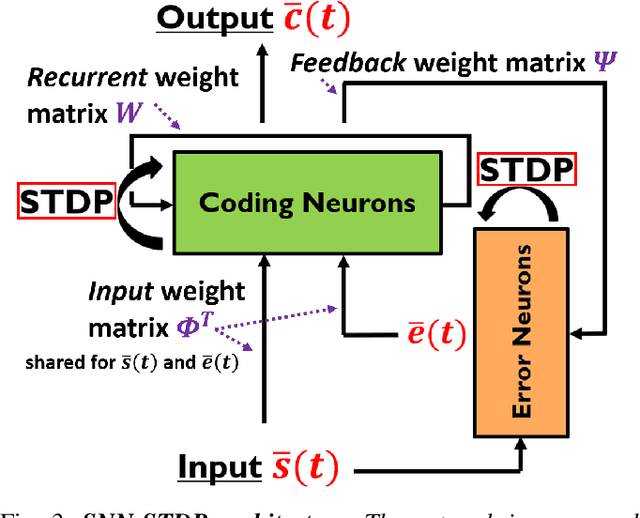
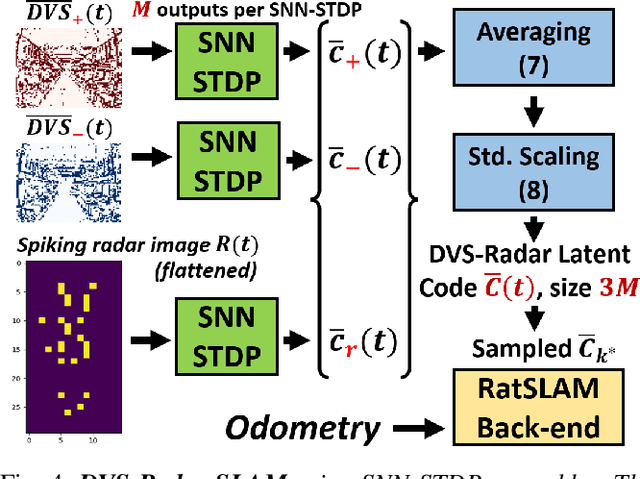
This work proposes a first-of-its-kind SLAM architecture fusing an event-based camera and a Frequency Modulated Continuous Wave (FMCW) radar for drone navigation. Each sensor is processed by a bio-inspired Spiking Neural Network (SNN) with continual Spike-Timing-Dependent Plasticity (STDP) learning, as observed in the brain. In contrast to most learning-based SLAM systems%, which a) require the acquisition of a representative dataset of the environment in which navigation must be performed and b) require an off-line training phase, our method does not require any offline training phase, but rather the SNN continuously learns features from the input data on the fly via STDP. At the same time, the SNN outputs are used as feature descriptors for loop closure detection and map correction. We conduct numerous experiments to benchmark our system against state-of-the-art RGB methods and we demonstrate the robustness of our DVS-Radar SLAM approach under strong lighting variations.