 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInter-patient ECG Arrhythmia Classification with LGNs and LUTNs
Jan 16, 2026Deep Differentiable Logic Gate Networks (LGNs) and Lookup Table Networks (LUTNs) are demonstrated to be suitable for the automatic classification of electrocardiograms (ECGs) using the inter-patient paradigm. The methods are benchmarked using the MIT-BIH arrhythmia data set, achieving up to 94.28% accuracy and a $jκ$ index of 0.683 on a four-class classification problem. Our models use between 2.89k and 6.17k FLOPs, including preprocessing and readout, which is three to six orders of magnitude less compared to SOTA methods. A novel preprocessing method is utilized that attains superior performance compared to existing methods for both the mixed-patient and inter-patient paradigms. In addition, a novel method for training the Lookup Tables (LUTs) in LUTNs is devised that uses the Boolean equation of a multiplexer (MUX). Additionally, rate coding was utilized for the first time in these LGNs and LUTNs, enhancing the performance of LGNs. Furthermore, it is the first time that LGNs and LUTNs have been benchmarked on the MIT-BIH arrhythmia dataset using the inter-patient paradigm. Using an Artix 7 FPGA, between 2000 and 2990 LUTs were needed, and between 5 to 7 mW (i.e. 50 pJ to 70 pJ per inference) was estimated for running these models. The performance in terms of both accuracy and $jκ$-index is significantly higher compared to previous LGN results. These positive results suggest that one can utilize LGNs and LUTNs for the detection of arrhythmias at extremely low power and high speeds in heart implants or wearable devices, even for patients not included in the training set.
A Method for Optimizing Connections in Differentiable Logic Gate Networks
Jul 08, 2025We introduce a novel method for partial optimization of the connections in Deep Differentiable Logic Gate Networks (LGNs). Our training method utilizes a probability distribution over a subset of connections per gate input, selecting the connection with highest merit, after which the gate-types are selected. We show that the connection-optimized LGNs outperform standard fixed-connection LGNs on the Yin-Yang, MNIST and Fashion-MNIST benchmarks, while requiring only a fraction of the number of logic gates. When training all connections, we demonstrate that 8000 simple logic gates are sufficient to achieve over 98% on the MNIST data set. Additionally, we show that our network has 24 times fewer gates, while performing better on the MNIST data set compared to standard fully connected LGNs. As such, our work shows a pathway towards fully trainable Boolean logic.
Resource-Efficient Gesture Recognition using Low-Resolution Thermal Camera via Spiking Neural Networks and Sparse Segmentation
Jan 12, 2024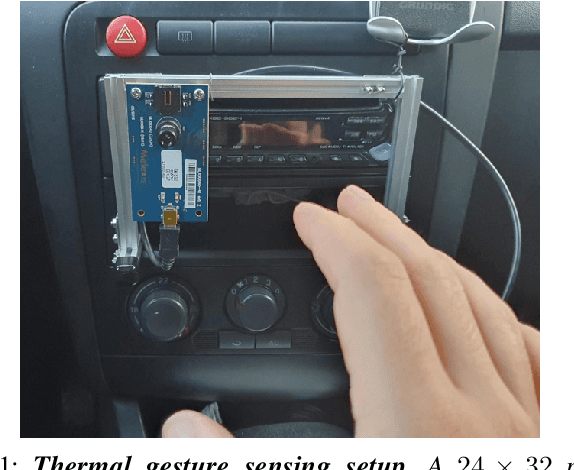



This work proposes a novel approach for hand gesture recognition using an inexpensive, low-resolution (24 x 32) thermal sensor processed by a Spiking Neural Network (SNN) followed by Sparse Segmentation and feature-based gesture classification via Robust Principal Component Analysis (R-PCA). Compared to the use of standard RGB cameras, the proposed system is insensitive to lighting variations while being significantly less expensive compared to high-frequency radars, time-of-flight cameras and high-resolution thermal sensors previously used in literature. Crucially, this paper shows that the innovative use of the recently proposed Monostable Multivibrator (MMV) neural networks as a new class of SNN achieves more than one order of magnitude smaller memory and compute complexity compared to deep learning approaches, while reaching a top gesture recognition accuracy of 93.9% using a 5-class thermal camera dataset acquired in a car cabin, within an automotive context. Our dataset is released for helping future research.
Active Inference in Hebbian Learning Networks
Jun 22, 2023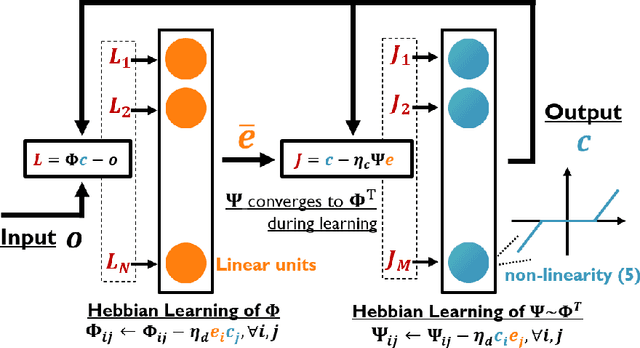
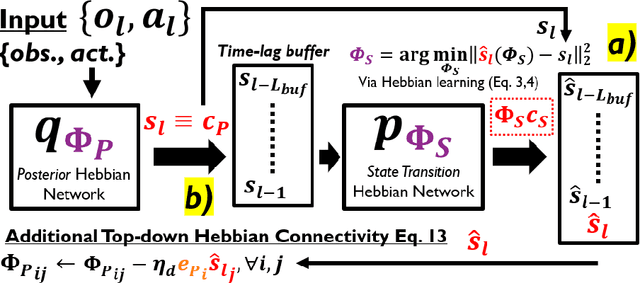
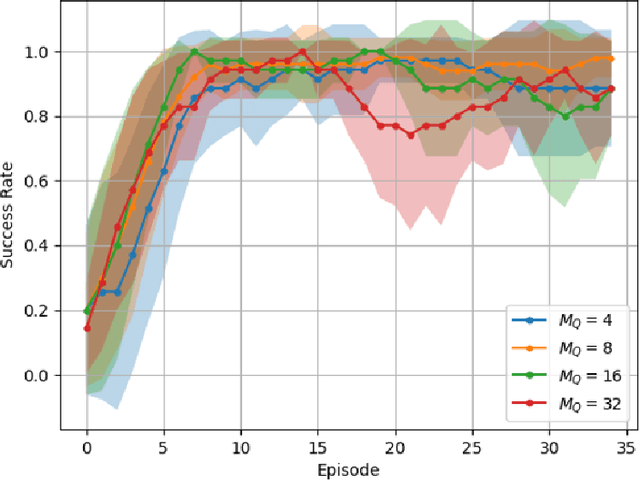
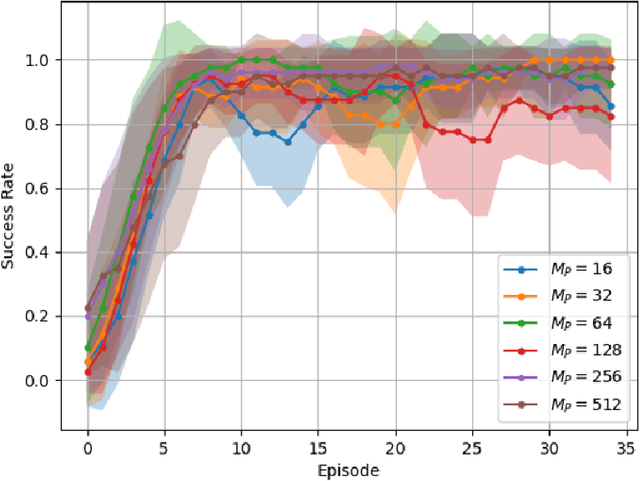
This work studies how brain-inspired neural ensembles equipped with local Hebbian plasticity can perform active inference (AIF) in order to control dynamical agents. A generative model capturing the environment dynamics is learned by a network composed of two distinct Hebbian ensembles: a posterior network, which infers latent states given the observations, and a state transition network, which predicts the next expected latent state given current state-action pairs. Experimental studies are conducted using the Mountain Car environment from the OpenAI gym suite, to study the effect of the various Hebbian network parameters on the task performance. It is shown that the proposed Hebbian AIF approach outperforms the use of Q-learning, while not requiring any replay buffer, as in typical reinforcement learning systems. These results motivate further investigations of Hebbian learning for the design of AIF networks that can learn environment dynamics without the need for revisiting past buffered experiences.
A Low-Complexity Radar Detector Outperforming OS-CFAR for Indoor Drone Obstacle Avoidance
Jul 15, 2021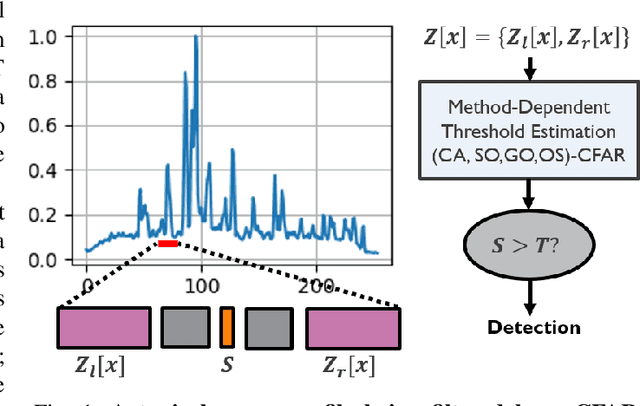
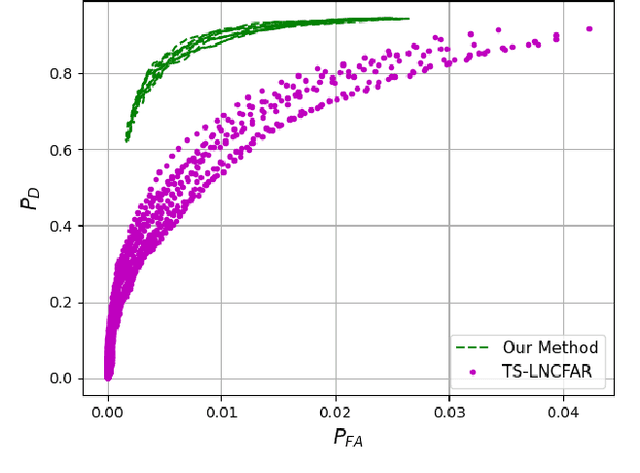
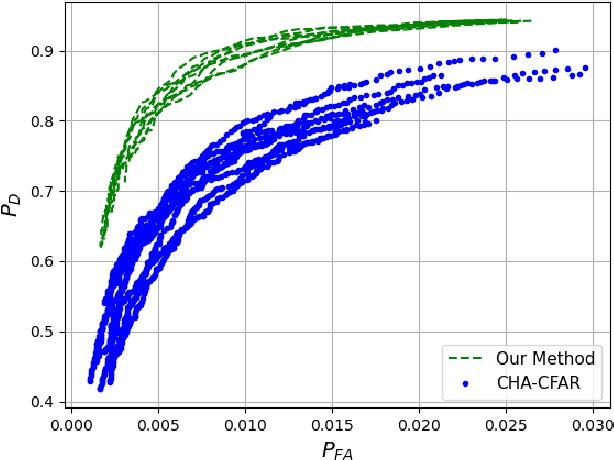
As radar sensors are being miniaturized, there is a growing interest for using them in indoor sensing applications such as indoor drone obstacle avoidance. In those novel scenarios, radars must perform well in dense scenes with a large number of neighboring scatterers. Central to radar performance is the detection algorithm used to separate targets from the background noise and clutter. Traditionally, most radar systems use conventional CFAR detectors but their performance degrades in indoor scenarios with many reflectors. Inspired by the advances in non-linear target detection, we propose a novel high-performance, yet low-complexity target detector and we experimentally validate our algorithm on a dataset acquired using a radar mounted on a drone. We experimentally show that our proposed algorithm drastically outperforms OS-CFAR (standard detector used in automotive systems) for our specific task of indoor drone navigation with more than 19% higher probability of detection for a given probability of false alarm. We also benchmark our proposed detector against a number of recently proposed multi-target CFAR detectors and show an improvement of 16% in probability of detection compared to CHA-CFAR, with even larger improvements compared to both OR-CFAR and TS-LNCFAR in our particular indoor scenario. To the best of our knowledge, this work improves the state of the art for high-performance yet low-complexity radar detection in critical indoor sensing applications.