 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuantifying Noise in Language Generation
Jan 29, 2026Kleinberg and Mullainathan recently proposed a formal framework for studying the phenomenon of language generation, called language generation in the limit. In this model, an adversary gives an enumeration of example strings from an unknown target language, and the algorithm is tasked with correctly generating unseen strings from the target language within finite time. Refined notions of non-uniform and uniform generation were later introduced by Li, Raman, and Tewari (2025), and a noisy model was introduced by Raman and Raman (2025), which allows the adversary to insert extraneous strings. A natural question in the noisy model is to quantify the effect of noise, by studying the impact of each additional extraneous string. We show two complementary results in this setting. We first show that for both uniform and non-uniform generation, a single noisy string strictly reduces the set of collections that can be generated, thus answering an open question in Raman and Raman (2025). Then, we show for both uniform and non-uniform generation that generation with a single noisy string is equivalent to generation with any finite amount of noise, sharply contrasting with the strict hierarchy for noisy generation in the limit shown by Bai, Panigrahi, and Zhang (2026). Finally, we leverage our previous results to provide the first known characterization for non-uniform noise-dependent generatability.
Fish Mouth Inspired Origami Gripper for Robust Multi-Type Underwater Grasping
Mar 14, 2025



Robotic grasping and manipulation in underwater environments present unique challenges for robotic hands traditionally used on land. These challenges stem from dynamic water conditions, a wide range of object properties from soft to stiff, irregular object shapes, and varying surface frictions. One common approach involves developing finger-based hands with embedded compliance using underactuation and soft actuators. This study introduces an effective alternative solution that does not rely on finger-based hand designs. We present a fish mouth inspired origami gripper that utilizes a single degree of freedom to perform a variety of robust grasping tasks underwater. The innovative structure transforms a simple uniaxial pulling motion into a grasping action based on the Yoshimura crease pattern folding. The origami gripper offers distinct advantages, including scalable and optimizable design, grasping compliance, and robustness, with four grasping types: pinch, power grasp, simultaneous grasping of multiple objects, and scooping from the seabed. In this work, we detail the design, modeling, fabrication, and validation of a specialized underwater gripper capable of handling various marine creatures, including jellyfish, crabs, and abalone. By leveraging an origami and bio-inspired approach, the presented gripper demonstrates promising potential for robotic grasping and manipulation in underwater environments.
A coarse-to-fine framework for unsupervised multi-contrast MR image deformable registration with dual consistency constraint
Aug 06, 2020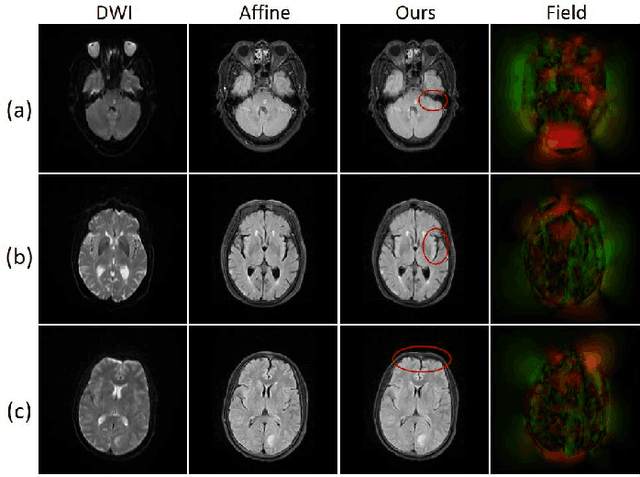
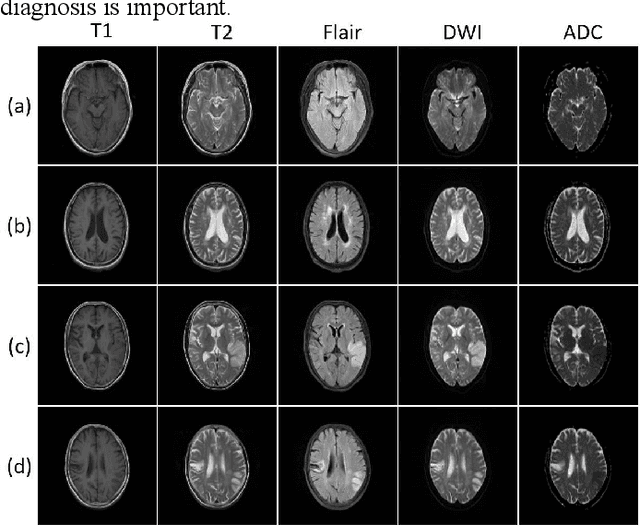
Multi-contrast magnetic resonance (MR) image registration is essential in the clinic to achieve fast and accurate imaging-based disease diagnosis and treatment planning. Nevertheless, the efficiency and performance of the existing registration algorithms can still be improved. In this paper, we propose a novel unsupervised learning-based framework to achieve accurate and efficient multi-contrast MR image registrations. Specifically, an end-to-end coarse-to-fine network architecture consisting of affine and deformable transformations is designed to get rid of both the multi-step iteration process and the complex image preprocessing operations. Furthermore, a dual consistency constraint and a new prior knowledge-based loss function are developed to enhance the registration performances. The proposed method has been evaluated on a clinical dataset that consists of 555 cases, with encouraging performances achieved. Compared to the commonly utilized registration methods, including Voxelmorph, SyN, and LDDMM, the proposed method achieves the best registration performance with a Dice score of 0.826 in identifying stroke lesions. More robust performance in low-signal areas is also observed. With regards to the registration speed, our method is about 17 times faster than the most competitive method of SyN when testing on a same CPU.