 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContainerized Vertical Farming Using Cobots
Oct 23, 2023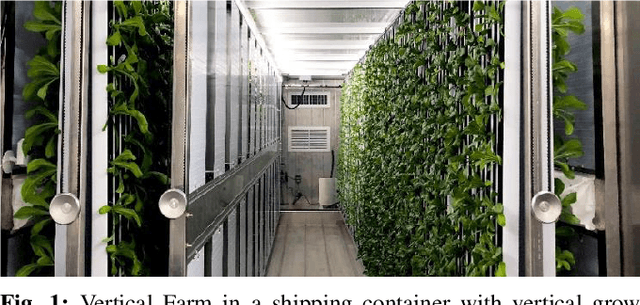

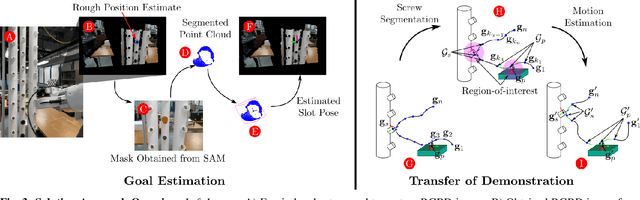

Containerized vertical farming is a type of vertical farming practice using hydroponics in which plants are grown in vertical layers within a mobile shipping container. Space limitations within shipping containers make the automation of different farming operations challenging. In this paper, we explore the use of cobots (i.e., collaborative robots) to automate two key farming operations, namely, the transplantation of saplings and the harvesting of grown plants. Our method uses a single demonstration from a farmer to extract the motion constraints associated with the tasks, namely, transplanting and harvesting, and can then generalize to different instances of the same task. For transplantation, the motion constraint arises during insertion of the sapling within the growing tube, whereas for harvesting, it arises during extraction from the growing tube. We present experimental results to show that using RGBD camera images (obtained from an eye-in-hand configuration) and one demonstration for each task, it is feasible to perform transplantation of saplings and harvesting of leafy greens using a cobot, without task-specific programming.
Task-Oriented Grasping with Point Cloud Representation of Objects
Sep 20, 2023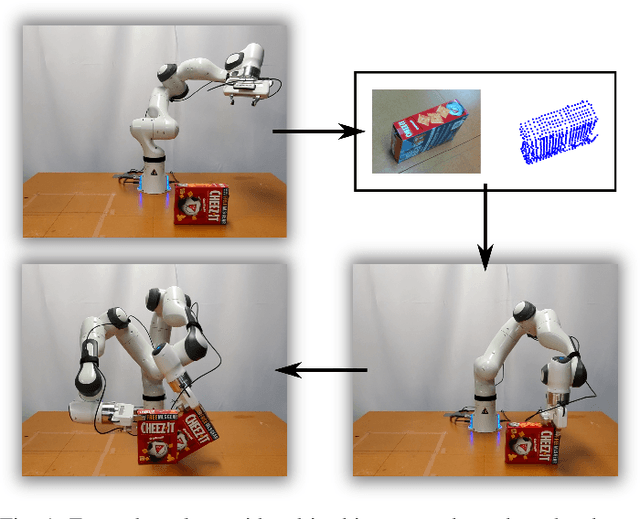
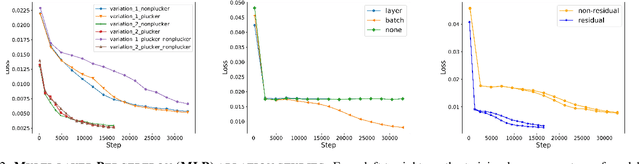
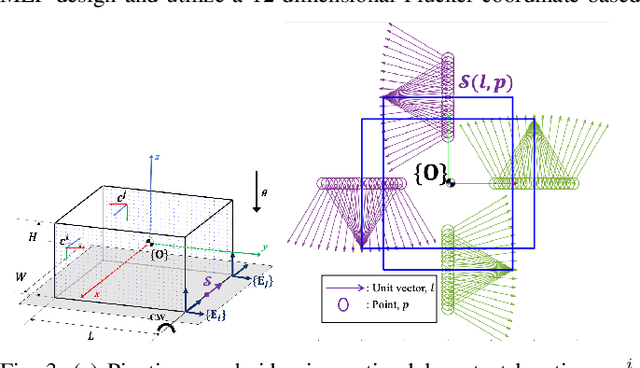
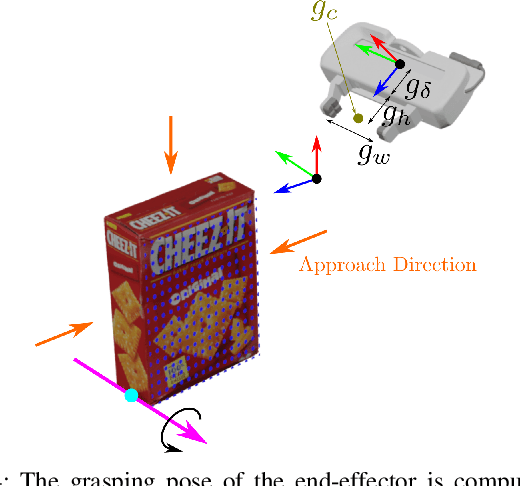
In this paper, we study the problem of task-oriented grasp synthesis from partial point cloud data using an eye-in-hand camera configuration. In task-oriented grasp synthesis, a grasp has to be selected so that the object is not lost during manipulation, and it is also ensured that adequate force/moment can be applied to perform the task. We formalize the notion of a gross manipulation task as a constant screw motion (or a sequence of constant screw motions) to be applied to the object after grasping. Using this notion of task, and a corresponding grasp quality metric developed in our prior work, we use a neural network to approximate a function for predicting the grasp quality metric on a cuboid shape. We show that by using a bounding box obtained from the partial point cloud of an object, and the grasp quality metric mentioned above, we can generate a good grasping region on the bounding box that can be used to compute an antipodal grasp on the actual object. Our algorithm does not use any manually labeled data or grasping simulator, thus making it very efficient to implement and integrate with screw linear interpolation-based motion planners. We present simulation as well as experimental results that show the effectiveness of our approach.
Automated Assessment of Critical View of Safety in Laparoscopic Cholecystectomy
Sep 13, 2023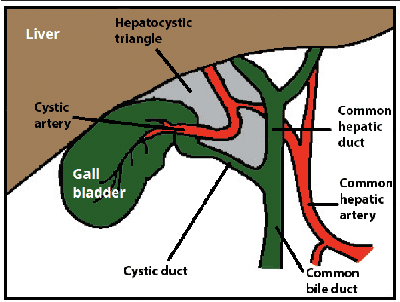
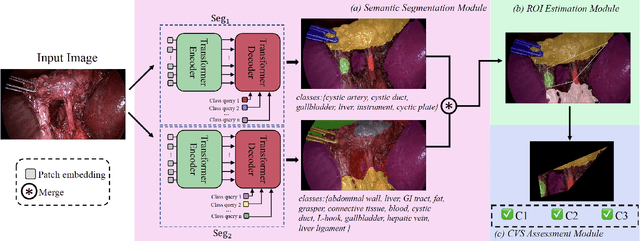
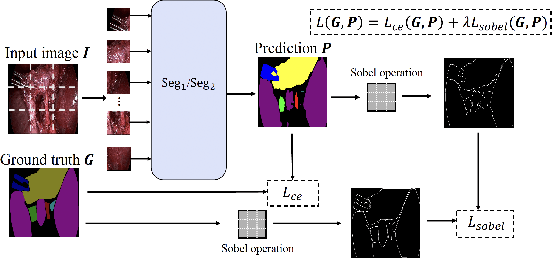
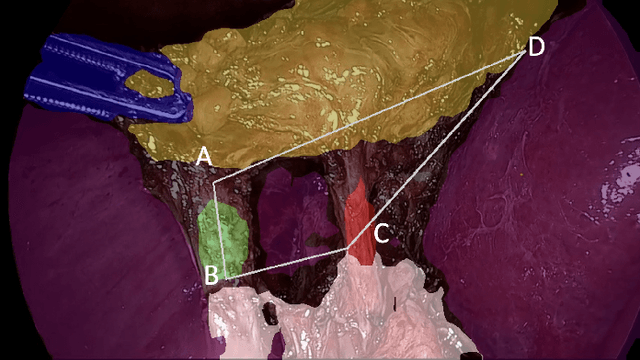
Cholecystectomy (gallbladder removal) is one of the most common procedures in the US, with more than 1.2M procedures annually. Compared with classical open cholecystectomy, laparoscopic cholecystectomy (LC) is associated with significantly shorter recovery period, and hence is the preferred method. However, LC is also associated with an increase in bile duct injuries (BDIs), resulting in significant morbidity and mortality. The primary cause of BDIs from LCs is misidentification of the cystic duct with the bile duct. Critical view of safety (CVS) is the most effective of safety protocols, which is said to be achieved during the surgery if certain criteria are met. However, due to suboptimal understanding and implementation of CVS, the BDI rates have remained stable over the last three decades. In this paper, we develop deep-learning techniques to automate the assessment of CVS in LCs. An innovative aspect of our research is on developing specialized learning techniques by incorporating domain knowledge to compensate for the limited training data available in practice. In particular, our CVS assessment process involves a fusion of two segmentation maps followed by an estimation of a certain region of interest based on anatomical structures close to the gallbladder, and then finally determination of each of the three CVS criteria via rule-based assessment of structural information. We achieved a gain of over 11.8% in mIoU on relevant classes with our two-stream semantic segmentation approach when compared to a single-model baseline, and 1.84% in mIoU with our proposed Sobel loss function when compared to a Transformer-based baseline model. For CVS criteria, we achieved up to 16% improvement and, for the overall CVS assessment, we achieved 5% improvement in balanced accuracy compared to DeepCVS under the same experiment settings.
EventScore: An Automated Real-time Early Warning Score for Clinical Events
Feb 14, 2021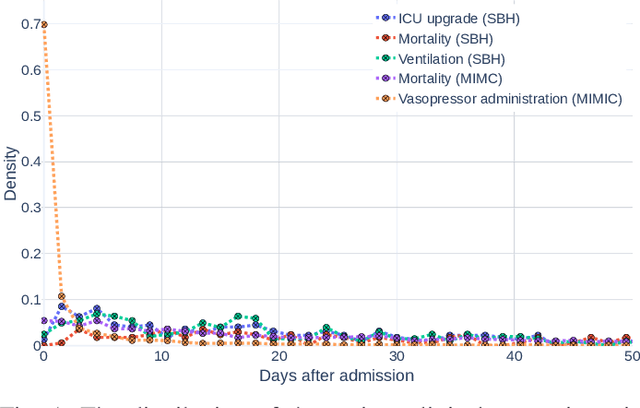
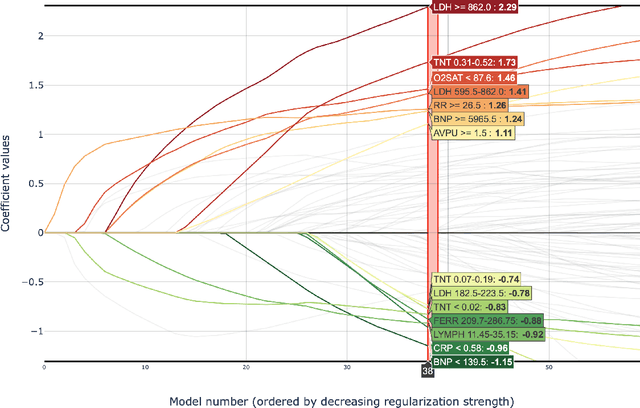
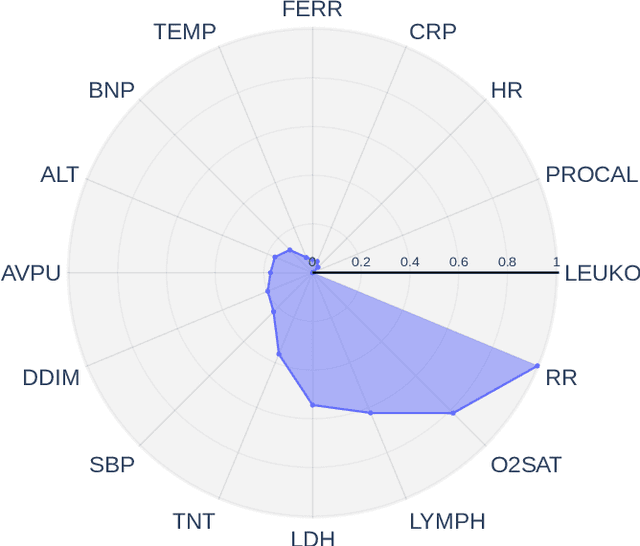
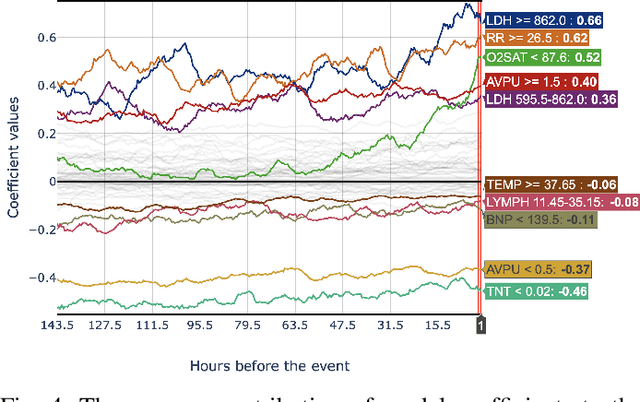
Early prediction of patients at risk of clinical deterioration can help physicians intervene and alter their clinical course towards better outcomes. In addition to the accuracy requirement, early warning systems must make the predictions early enough to give physicians enough time to intervene. Interpretability is also one of the challenges when building such systems since being able to justify the reasoning behind model decisions is desirable in clinical practice. In this work, we built an interpretable model for the early prediction of various adverse clinical events indicative of clinical deterioration. The model is evaluated on two datasets and four clinical events. The first dataset is collected in a predominantly COVID-19 positive population at Stony Brook Hospital. The second dataset is the MIMIC III dataset. The model was trained to provide early warning scores for ventilation, ICU transfer, and mortality prediction tasks on the Stony Brook Hospital dataset and to predict mortality and the need for vasopressors on the MIMIC III dataset. Our model first separates each feature into multiple ranges and then uses logistic regression with lasso penalization to select the subset of ranges for each feature. The model training is completely automated and doesn't require expert knowledge like other early warning scores. We compare our model to the Modified Early Warning Score (MEWS) and quick SOFA (qSOFA), commonly used in hospitals. We show that our model outperforms these models in the area under the receiver operating characteristic curve (AUROC) while having a similar or better median detection time on all clinical events, even when using fewer features. Unlike MEWS and qSOFA, our model can be entirely automated without requiring any manually recorded features. We also show that discretization improves model performance by comparing our model to a baseline logistic regression model.