 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFaster Parameter-Efficient Tuning with Token Redundancy Reduction
Mar 26, 2025Parameter-efficient tuning (PET) aims to transfer pre-trained foundation models to downstream tasks by learning a small number of parameters. Compared to traditional fine-tuning, which updates the entire model, PET significantly reduces storage and transfer costs for each task regardless of exponentially increasing pre-trained model capacity. However, most PET methods inherit the inference latency of their large backbone models and often introduce additional computational overhead due to additional modules (e.g. adapters), limiting their practicality for compute-intensive applications. In this paper, we propose Faster Parameter-Efficient Tuning (FPET), a novel approach that enhances inference speed and training efficiency while maintaining high storage efficiency. Specifically, we introduce a plug-and-play token redundancy reduction module delicately designed for PET. This module refines tokens from the self-attention layer using an adapter to learn the accurate similarity between tokens and cuts off the tokens through a fully-differentiable token merging strategy, which uses a straight-through estimator for optimal token reduction. Experimental results prove that our FPET achieves faster inference and higher memory efficiency than the pre-trained backbone while keeping competitive performance on par with state-of-the-art PET methods.
Enhancing Source-Free Domain Adaptive Object Detection with Low-confidence Pseudo Label Distillation
Jul 18, 2024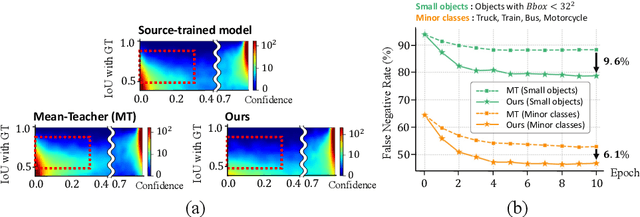
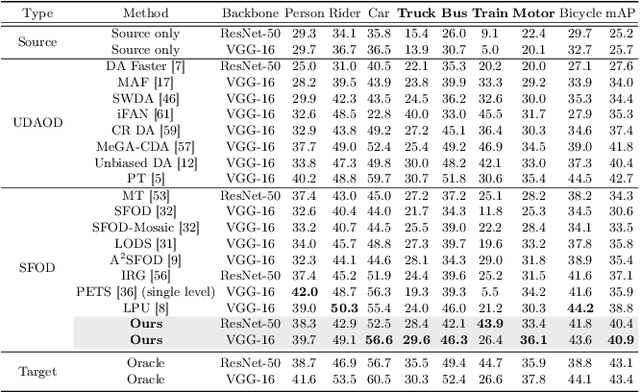
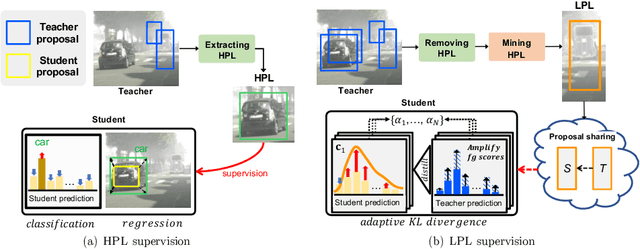
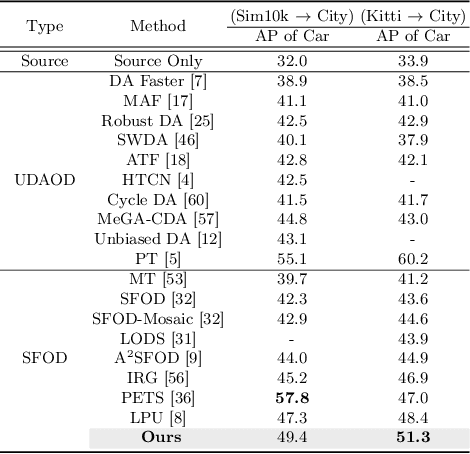
Source-Free domain adaptive Object Detection (SFOD) is a promising strategy for deploying trained detectors to new, unlabeled domains without accessing source data, addressing significant concerns around data privacy and efficiency. Most SFOD methods leverage a Mean-Teacher (MT) self-training paradigm relying heavily on High-confidence Pseudo Labels (HPL). However, these HPL often overlook small instances that undergo significant appearance changes with domain shifts. Additionally, HPL ignore instances with low confidence due to the scarcity of training samples, resulting in biased adaptation toward familiar instances from the source domain. To address this limitation, we introduce the Low-confidence Pseudo Label Distillation (LPLD) loss within the Mean-Teacher based SFOD framework. This novel approach is designed to leverage the proposals from Region Proposal Network (RPN), which potentially encompasses hard-to-detect objects in unfamiliar domains. Initially, we extract HPL using a standard pseudo-labeling technique and mine a set of Low-confidence Pseudo Labels (LPL) from proposals generated by RPN, leaving those that do not overlap significantly with HPL. These LPL are further refined by leveraging class-relation information and reducing the effect of inherent noise for the LPLD loss calculation. Furthermore, we use feature distance to adaptively weight the LPLD loss to focus on LPL containing a larger foreground area. Our method outperforms previous SFOD methods on four cross-domain object detection benchmarks. Extensive experiments demonstrate that our LPLD loss leads to effective adaptation by reducing false negatives and facilitating the use of domain-invariant knowledge from the source model. Code is available at https://github.com/junia3/LPLD.
Improving Visual Recognition with Hyperbolical Visual Hierarchy Mapping
Apr 01, 2024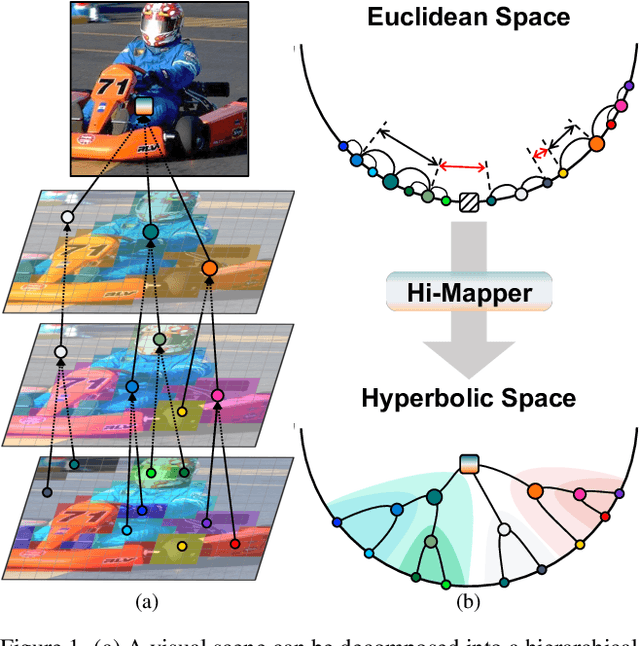
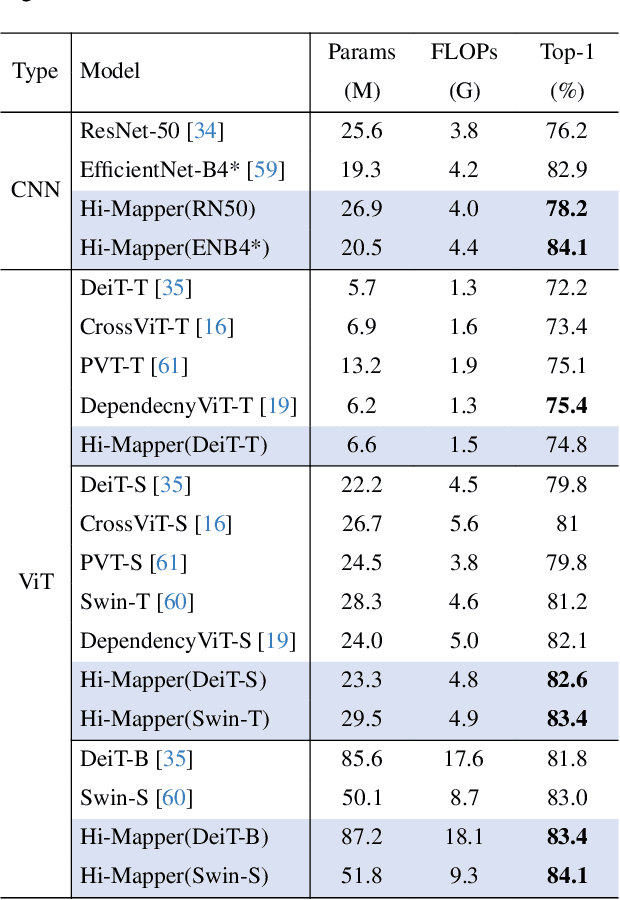
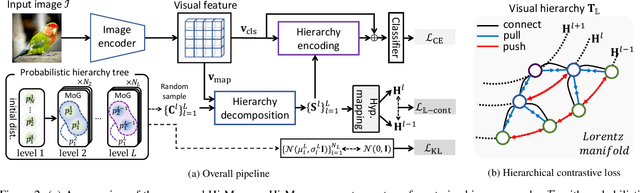
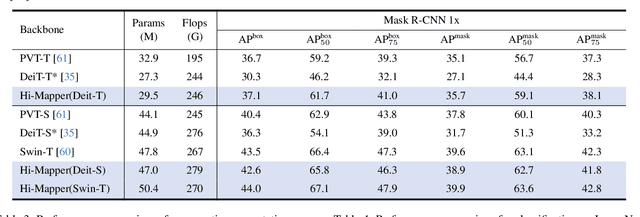
Visual scenes are naturally organized in a hierarchy, where a coarse semantic is recursively comprised of several fine details. Exploring such a visual hierarchy is crucial to recognize the complex relations of visual elements, leading to a comprehensive scene understanding. In this paper, we propose a Visual Hierarchy Mapper (Hi-Mapper), a novel approach for enhancing the structured understanding of the pre-trained Deep Neural Networks (DNNs). Hi-Mapper investigates the hierarchical organization of the visual scene by 1) pre-defining a hierarchy tree through the encapsulation of probability densities; and 2) learning the hierarchical relations in hyperbolic space with a novel hierarchical contrastive loss. The pre-defined hierarchy tree recursively interacts with the visual features of the pre-trained DNNs through hierarchy decomposition and encoding procedures, thereby effectively identifying the visual hierarchy and enhancing the recognition of an entire scene. Extensive experiments demonstrate that Hi-Mapper significantly enhances the representation capability of DNNs, leading to an improved performance on various tasks, including image classification and dense prediction tasks.
Layer-wise Auto-Weighting for Non-Stationary Test-Time Adaptation
Nov 26, 2023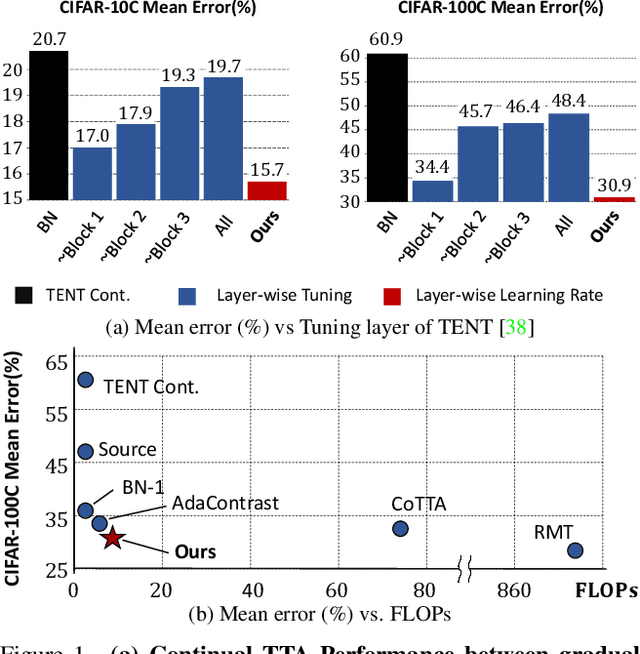
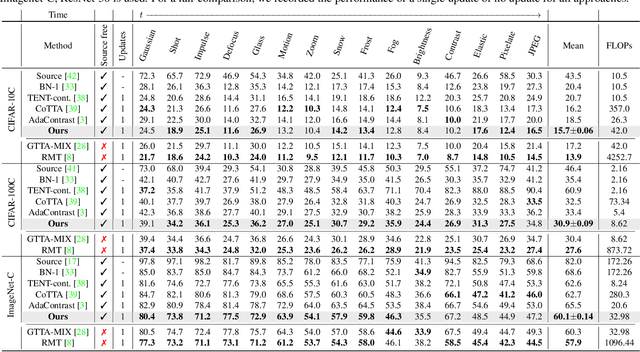
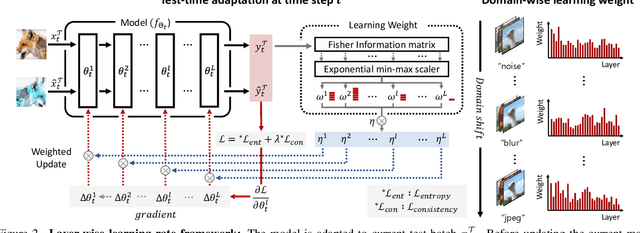
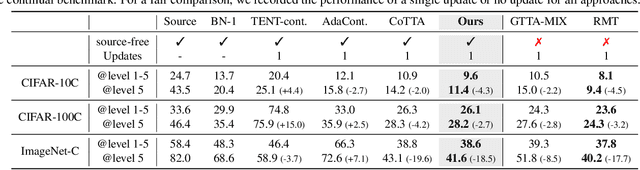
Given the inevitability of domain shifts during inference in real-world applications, test-time adaptation (TTA) is essential for model adaptation after deployment. However, the real-world scenario of continuously changing target distributions presents challenges including catastrophic forgetting and error accumulation. Existing TTA methods for non-stationary domain shifts, while effective, incur excessive computational load, making them impractical for on-device settings. In this paper, we introduce a layer-wise auto-weighting algorithm for continual and gradual TTA that autonomously identifies layers for preservation or concentrated adaptation. By leveraging the Fisher Information Matrix (FIM), we first design the learning weight to selectively focus on layers associated with log-likelihood changes while preserving unrelated ones. Then, we further propose an exponential min-max scaler to make certain layers nearly frozen while mitigating outliers. This minimizes forgetting and error accumulation, leading to efficient adaptation to non-stationary target distribution. Experiments on CIFAR-10C, CIFAR-100C, and ImageNet-C show our method outperforms conventional continual and gradual TTA approaches while significantly reducing computational load, highlighting the importance of FIM-based learning weight in adapting to continuously or gradually shifting target domains.
Knowing Where to Focus: Event-aware Transformer for Video Grounding
Aug 14, 2023Recent DETR-based video grounding models have made the model directly predict moment timestamps without any hand-crafted components, such as a pre-defined proposal or non-maximum suppression, by learning moment queries. However, their input-agnostic moment queries inevitably overlook an intrinsic temporal structure of a video, providing limited positional information. In this paper, we formulate an event-aware dynamic moment query to enable the model to take the input-specific content and positional information of the video into account. To this end, we present two levels of reasoning: 1) Event reasoning that captures distinctive event units constituting a given video using a slot attention mechanism; and 2) moment reasoning that fuses the moment queries with a given sentence through a gated fusion transformer layer and learns interactions between the moment queries and video-sentence representations to predict moment timestamps. Extensive experiments demonstrate the effectiveness and efficiency of the event-aware dynamic moment queries, outperforming state-of-the-art approaches on several video grounding benchmarks.
Probabilistic Prompt Learning for Dense Prediction
Apr 03, 2023Recent progress in deterministic prompt learning has become a promising alternative to various downstream vision tasks, enabling models to learn powerful visual representations with the help of pre-trained vision-language models. However, this approach results in limited performance for dense prediction tasks that require handling more complex and diverse objects, since a single and deterministic description cannot sufficiently represent the entire image. In this paper, we present a novel probabilistic prompt learning to fully exploit the vision-language knowledge in dense prediction tasks. First, we introduce learnable class-agnostic attribute prompts to describe universal attributes across the object class. The attributes are combined with class information and visual-context knowledge to define the class-specific textual distribution. Text representations are sampled and used to guide the dense prediction task using the probabilistic pixel-text matching loss, enhancing the stability and generalization capability of the proposed method. Extensive experiments on different dense prediction tasks and ablation studies demonstrate the effectiveness of our proposed method.
Dual Prototypical Contrastive Learning for Few-shot Semantic Segmentation
Nov 09, 2021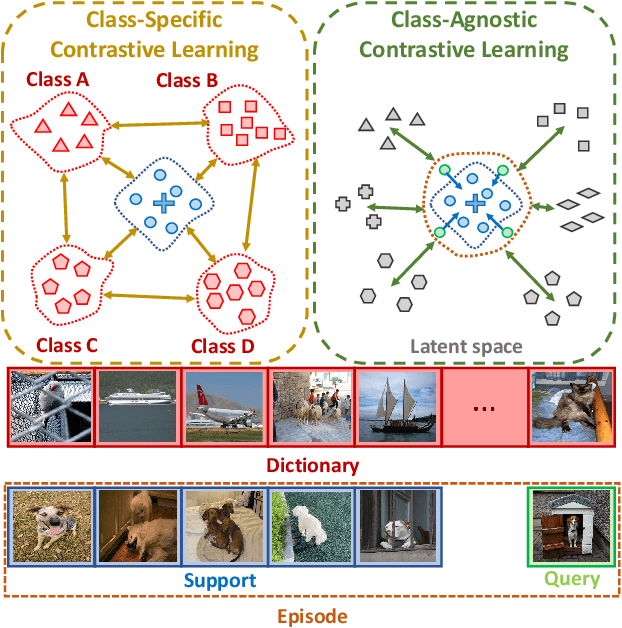
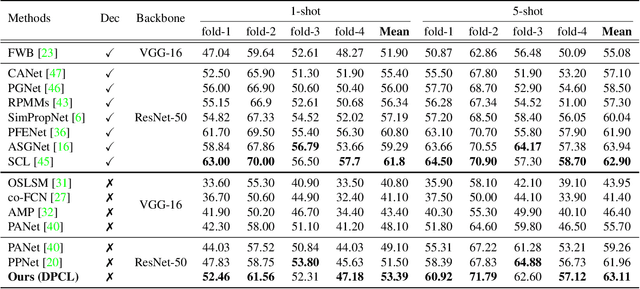
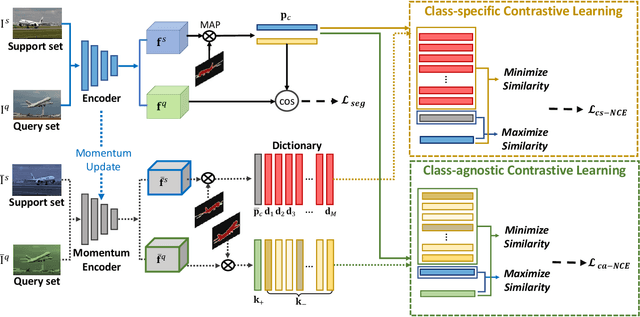

We address the problem of few-shot semantic segmentation (FSS), which aims to segment novel class objects in a target image with a few annotated samples. Though recent advances have been made by incorporating prototype-based metric learning, existing methods still show limited performance under extreme intra-class object variations and semantically similar inter-class objects due to their poor feature representation. To tackle this problem, we propose a dual prototypical contrastive learning approach tailored to the FSS task to capture the representative semanticfeatures effectively. The main idea is to encourage the prototypes more discriminative by increasing inter-class distance while reducing intra-class distance in prototype feature space. To this end, we first present a class-specific contrastive loss with a dynamic prototype dictionary that stores the class-aware prototypes during training, thus enabling the same class prototypes similar and the different class prototypes to be dissimilar. Furthermore, we introduce a class-agnostic contrastive loss to enhance the generalization ability to unseen classes by compressing the feature distribution of semantic class within each episode. We demonstrate that the proposed dual prototypical contrastive learning approach outperforms state-of-the-art FSS methods on PASCAL-5i and COCO-20i datasets. The code is available at:https://github.com/kwonjunn01/DPCL1.