 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancing Source-Free Domain Adaptive Object Detection with Low-confidence Pseudo Label Distillation
Jul 18, 2024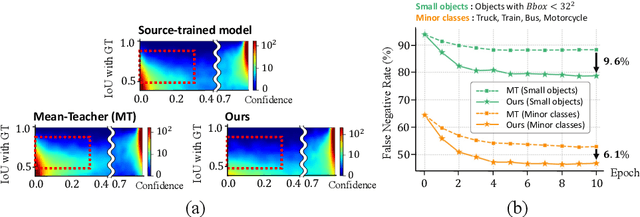
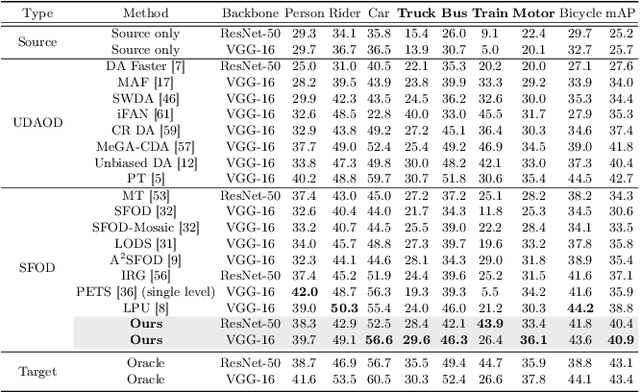
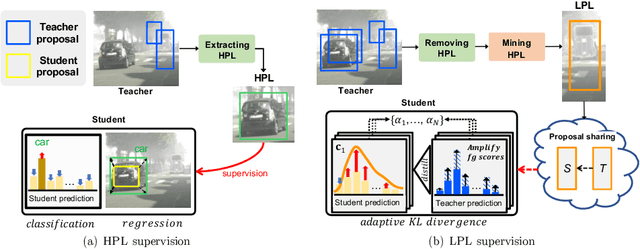
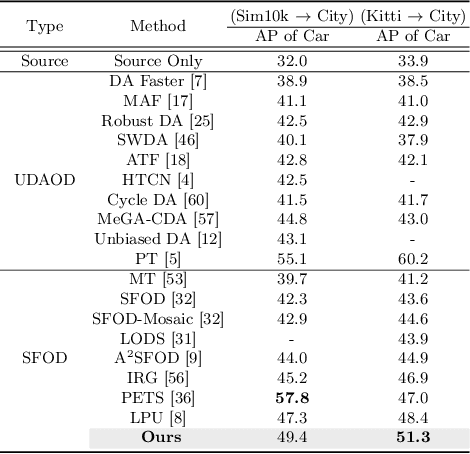
Source-Free domain adaptive Object Detection (SFOD) is a promising strategy for deploying trained detectors to new, unlabeled domains without accessing source data, addressing significant concerns around data privacy and efficiency. Most SFOD methods leverage a Mean-Teacher (MT) self-training paradigm relying heavily on High-confidence Pseudo Labels (HPL). However, these HPL often overlook small instances that undergo significant appearance changes with domain shifts. Additionally, HPL ignore instances with low confidence due to the scarcity of training samples, resulting in biased adaptation toward familiar instances from the source domain. To address this limitation, we introduce the Low-confidence Pseudo Label Distillation (LPLD) loss within the Mean-Teacher based SFOD framework. This novel approach is designed to leverage the proposals from Region Proposal Network (RPN), which potentially encompasses hard-to-detect objects in unfamiliar domains. Initially, we extract HPL using a standard pseudo-labeling technique and mine a set of Low-confidence Pseudo Labels (LPL) from proposals generated by RPN, leaving those that do not overlap significantly with HPL. These LPL are further refined by leveraging class-relation information and reducing the effect of inherent noise for the LPLD loss calculation. Furthermore, we use feature distance to adaptively weight the LPLD loss to focus on LPL containing a larger foreground area. Our method outperforms previous SFOD methods on four cross-domain object detection benchmarks. Extensive experiments demonstrate that our LPLD loss leads to effective adaptation by reducing false negatives and facilitating the use of domain-invariant knowledge from the source model. Code is available at https://github.com/junia3/LPLD.
Track Initialization and Re-Identification for~3D Multi-View Multi-Object Tracking
May 28, 2024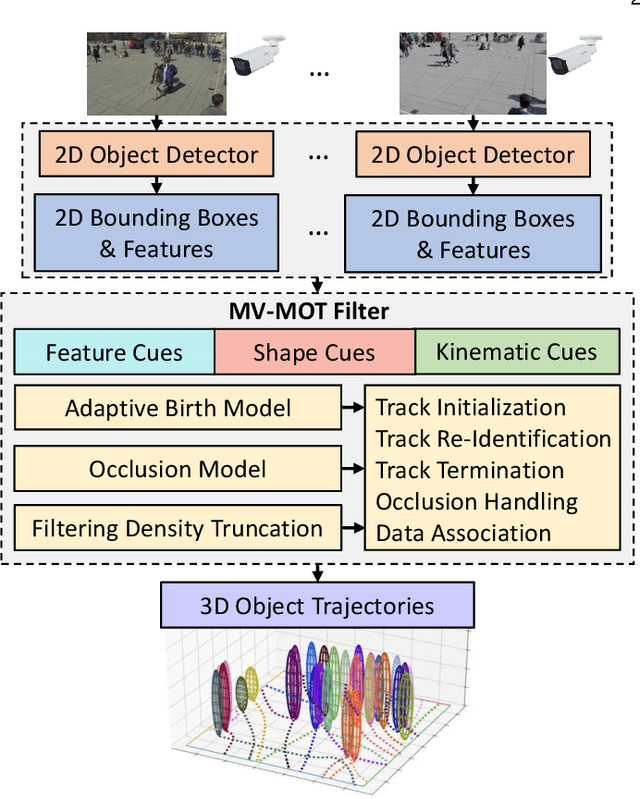

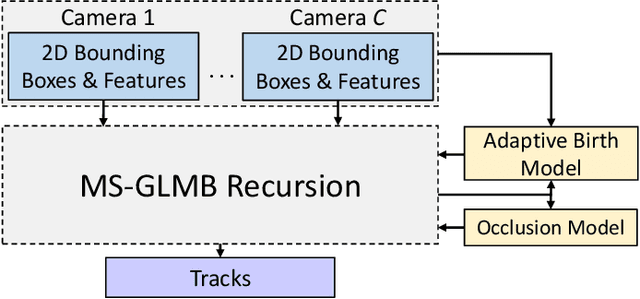

We propose a 3D multi-object tracking (MOT) solution using only 2D detections from monocular cameras, which automatically initiates/terminates tracks as well as resolves track appearance-reappearance and occlusions. Moreover, this approach does not require detector retraining when cameras are reconfigured but only the camera matrices of reconfigured cameras need to be updated. Our approach is based on a Bayesian multi-object formulation that integrates track initiation/termination, re-identification, occlusion handling, and data association into a single Bayes filtering recursion. However, the exact filter that utilizes all these functionalities is numerically intractable due to the exponentially growing number of terms in the (multi-object) filtering density, while existing approximations trade-off some of these functionalities for speed. To this end, we develop a more efficient approximation suitable for online MOT by incorporating object features and kinematics into the measurement model, which improves data association and subsequently reduces the number of terms. Specifically, we exploit the 2D detections and extracted features from multiple cameras to provide a better approximation of the multi-object filtering density to realize the track initiation/termination and re-identification functionalities. Further, incorporating a tractable geometric occlusion model based on 2D projections of 3D objects on the camera planes realizes the occlusion handling functionality of the filter. Evaluation of the proposed solution on challenging datasets demonstrates significant improvements and robustness when camera configurations change on-the-fly, compared to existing multi-view MOT solutions. The source code is publicly available at https://github.com/linh-gist/mv-glmb-ab.