 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3D Multi-Object Tracking Employing MS-GLMB Filter for Autonomous Driving
Oct 19, 2024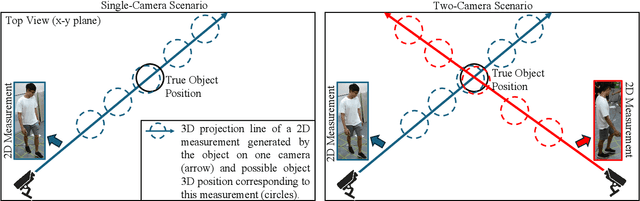
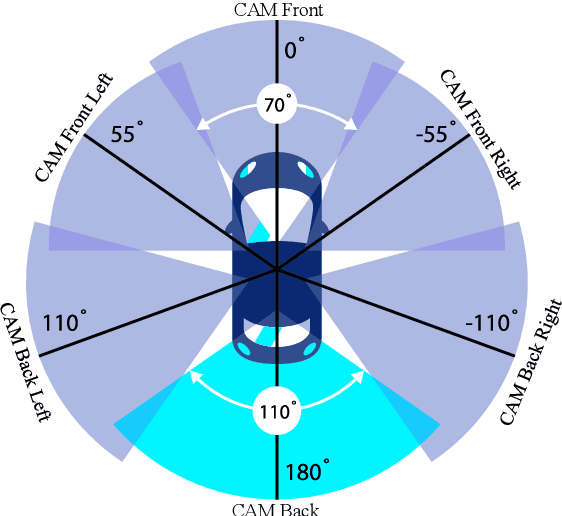
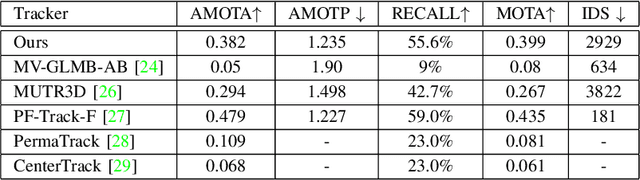
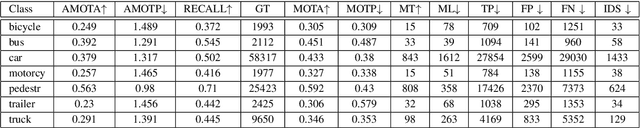
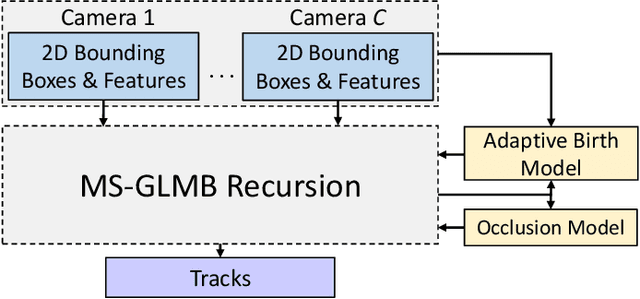
The MS-GLMB filter offers a robust framework for tracking multiple objects through the use of multi-sensor data. Building on this, the MV-GLMB and MV-GLMB-AB filters enhance the MS-GLMB capabilities by employing cameras for 3D multi-sensor multi-object tracking, effectively addressing occlusions. However, both filters depend on overlapping fields of view from the cameras to combine complementary information. In this paper, we introduce an improved approach that integrates an additional sensor, such as LiDAR, into the MS-GLMB framework for 3D multi-object tracking. Specifically, we present a new LiDAR measurement model, along with a multi-camera and LiDAR multi-object measurement model. Our experimental results demonstrate a significant improvement in tracking performance compared to existing MS-GLMB-based methods. Importantly, our method eliminates the need for overlapping fields of view, broadening the applicability of the MS-GLMB filter. Our source code for nuScenes dataset is available at https://github.com/linh-gist/ms-glmb-nuScenes.
Visual Multi-Object Tracking with Re-Identification and Occlusion Handling using Labeled Random Finite Sets
Jul 11, 2024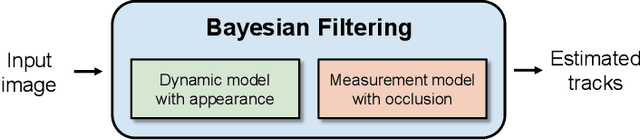
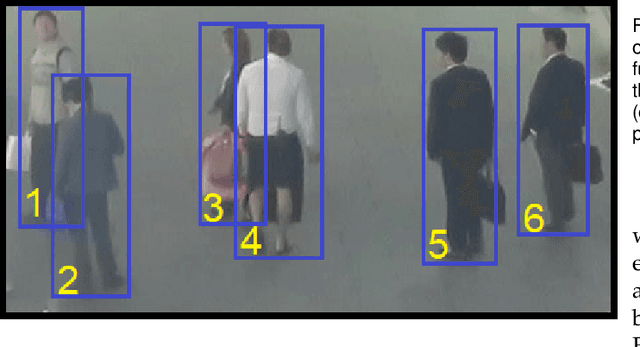
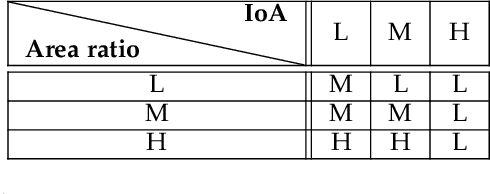
This paper proposes an online visual multi-object tracking (MOT) algorithm that resolves object appearance-reappearance and occlusion. Our solution is based on the labeled random finite set (LRFS) filtering approach, which in principle, addresses disappearance, appearance, reappearance, and occlusion via a single Bayesian recursion. However, in practice, existing numerical approximations cause reappearing objects to be initialized as new tracks, especially after long periods of being undetected. In occlusion handling, the filter's efficacy is dictated by trade-offs between the sophistication of the occlusion model and computational demand. Our contribution is a novel modeling method that exploits object features to address reappearing objects whilst maintaining a linear complexity in the number of detections. Moreover, to improve the filter's occlusion handling, we propose a fuzzy detection model that takes into consideration the overlapping areas between tracks and their sizes. We also develop a fast version of the filter to further reduce the computational time.
Track Initialization and Re-Identification for~3D Multi-View Multi-Object Tracking
May 28, 2024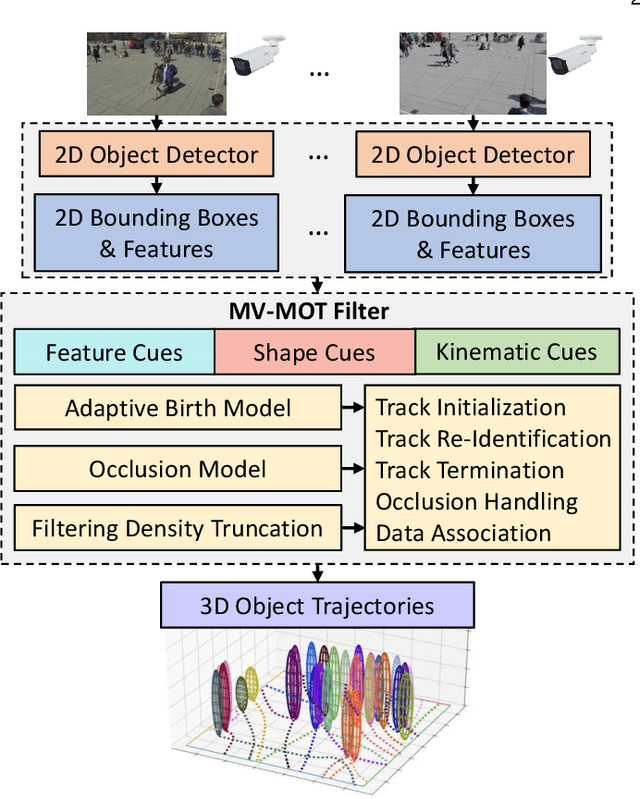


We propose a 3D multi-object tracking (MOT) solution using only 2D detections from monocular cameras, which automatically initiates/terminates tracks as well as resolves track appearance-reappearance and occlusions. Moreover, this approach does not require detector retraining when cameras are reconfigured but only the camera matrices of reconfigured cameras need to be updated. Our approach is based on a Bayesian multi-object formulation that integrates track initiation/termination, re-identification, occlusion handling, and data association into a single Bayes filtering recursion. However, the exact filter that utilizes all these functionalities is numerically intractable due to the exponentially growing number of terms in the (multi-object) filtering density, while existing approximations trade-off some of these functionalities for speed. To this end, we develop a more efficient approximation suitable for online MOT by incorporating object features and kinematics into the measurement model, which improves data association and subsequently reduces the number of terms. Specifically, we exploit the 2D detections and extracted features from multiple cameras to provide a better approximation of the multi-object filtering density to realize the track initiation/termination and re-identification functionalities. Further, incorporating a tractable geometric occlusion model based on 2D projections of 3D objects on the camera planes realizes the occlusion handling functionality of the filter. Evaluation of the proposed solution on challenging datasets demonstrates significant improvements and robustness when camera configurations change on-the-fly, compared to existing multi-view MOT solutions. The source code is publicly available at https://github.com/linh-gist/mv-glmb-ab.
Adaptive Confidence Threshold for ByteTrack in Multi-Object Tracking
Dec 06, 2023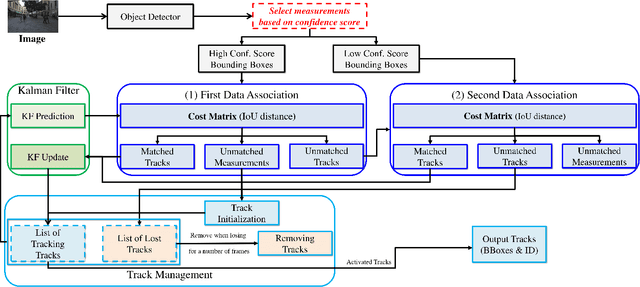
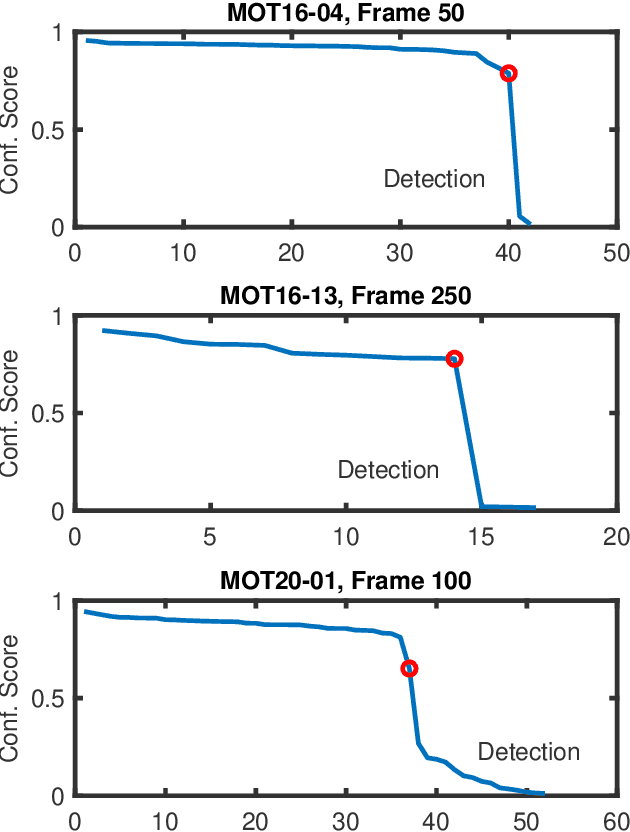

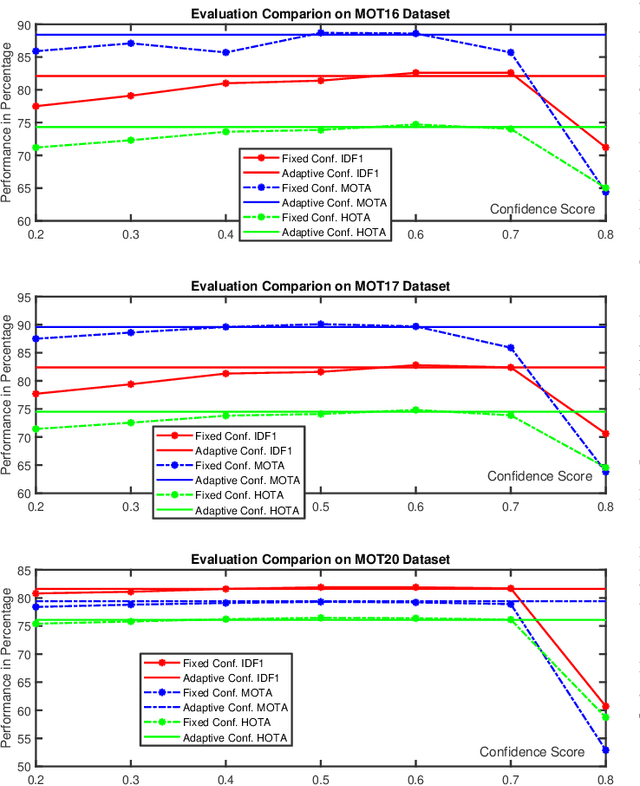
We investigate the application of ByteTrack in the realm of multiple object tracking. ByteTrack, a simple tracking algorithm, enables the simultaneous tracking of multiple objects by strategically incorporating detections with a low confidence threshold. Conventionally, objects are initially associated with high confidence threshold detections. When the association between objects and detections becomes ambiguous, ByteTrack extends the association to lower confidence threshold detections. One notable drawback of the existing ByteTrack approach is its reliance on a fixed threshold to differentiate between high and low-confidence detections. In response to this limitation, we introduce a novel and adaptive approach. Our proposed method entails a dynamic adjustment of the confidence threshold, leveraging insights derived from overall detections. Through experimentation, we demonstrate the effectiveness of our adaptive confidence threshold technique while maintaining running time compared to ByteTrack.
* The 12th International Conference on Control, Automation and Information Sciences (ICCAIS 2023), November 27th to 29th, 2023 in Hanoi
Resolving Camera Position for a Practical Application of Gaze Estimation on Edge Devices
Jan 15, 2022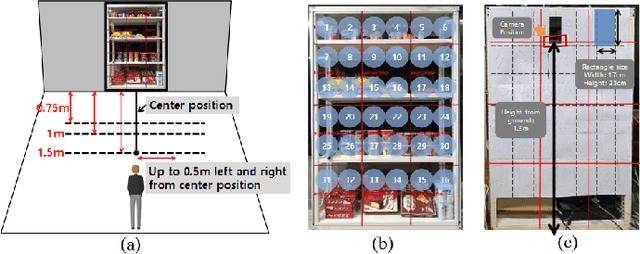


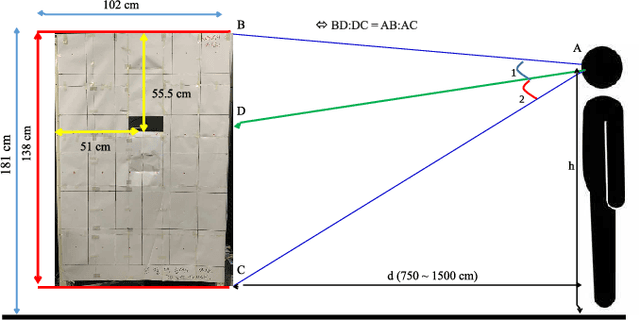
Most Gaze estimation research only works on a setup condition that a camera perfectly captures eyes gaze. They have not literarily specified how to set up a camera correctly for a given position of a person. In this paper, we carry out a study on gaze estimation with a logical camera setup position. We further bring our research in a practical application by using inexpensive edge devices with a realistic scenario. That is, we first set up a shopping environment where we want to grasp customers gazing behaviors. This setup needs an optimal camera position in order to maintain estimation accuracy from existing gaze estimation research. We then apply the state-of-the-art of few-shot learning gaze estimation to reduce training sampling in the inference phase. In the experiment, we perform our implemented research on NVIDIA Jetson TX2 and achieve a reasonable speed, 12 FPS which is faster compared with our reference work, without much degradation of gaze estimation accuracy. The source code is released at https://github.com/linh-gist/GazeEstimationTX2.
* 6 pages, 11 figures, conference paper