 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3D Multi-Object Tracking Employing MS-GLMB Filter for Autonomous Driving
Paper and Code
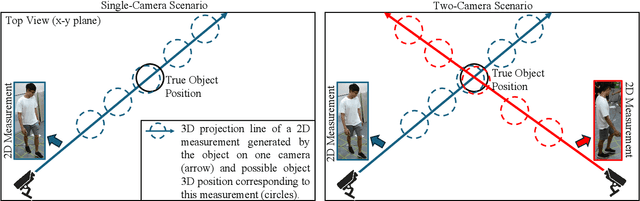
The MS-GLMB filter offers a robust framework for tracking multiple objects through the use of multi-sensor data. Building on this, the MV-GLMB and MV-GLMB-AB filters enhance the MS-GLMB capabilities by employing cameras for 3D multi-sensor multi-object tracking, effectively addressing occlusions. However, both filters depend on overlapping fields of view from the cameras to combine complementary information. In this paper, we introduce an improved approach that integrates an additional sensor, such as LiDAR, into the MS-GLMB framework for 3D multi-object tracking. Specifically, we present a new LiDAR measurement model, along with a multi-camera and LiDAR multi-object measurement model. Our experimental results demonstrate a significant improvement in tracking performance compared to existing MS-GLMB-based methods. Importantly, our method eliminates the need for overlapping fields of view, broadening the applicability of the MS-GLMB filter. Our source code for nuScenes dataset is available at https://github.com/linh-gist/ms-glmb-nuScenes.