 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeL-XAIDS: A LIME-based eXplainable AI framework for Intrusion Detection Systems
Aug 24, 2025Recent developments in Artificial Intelligence (AI) and their applications in critical industries such as healthcare, fin-tech and cybersecurity have led to a surge in research in explainability in AI. Innovative research methods are being explored to extract meaningful insight from blackbox AI systems to make the decision-making technology transparent and interpretable. Explainability becomes all the more critical when AI is used in decision making in domains like fintech, healthcare and safety critical systems such as cybersecurity and autonomous vehicles. However, there is still ambiguity lingering on the reliable evaluations for the users and nature of transparency in the explanations provided for the decisions made by black-boxed AI. To solve the blackbox nature of Machine Learning based Intrusion Detection Systems, a framework is proposed in this paper to give an explanation for IDSs decision making. This framework uses Local Interpretable Model-Agnostic Explanations (LIME) coupled with Explain Like I'm five (ELI5) and Decision Tree algorithms to provide local and global explanations and improve the interpretation of IDSs. The local explanations provide the justification for the decision made on a specific input. Whereas, the global explanations provides the list of significant features and their relationship with attack traffic. In addition, this framework brings transparency in the field of ML driven IDS that might be highly significant for wide scale adoption of eXplainable AI in cyber-critical systems. Our framework is able to achieve 85 percent accuracy in classifying attack behaviour on UNSW-NB15 dataset, while at the same time displaying the feature significance ranking of the top 10 features used in the classification.
Time series forecasting based on optimized LLM for fault prediction in distribution power grid insulators
Feb 24, 2025Surface contamination on electrical grid insulators leads to an increase in leakage current until an electrical discharge occurs, which can result in a power system shutdown. To mitigate the possibility of disruptive faults resulting in a power outage, monitoring contamination and leakage current can help predict the progression of faults. Given this need, this paper proposes a hybrid deep learning (DL) model for predicting the increase in leakage current in high-voltage insulators. The hybrid structure considers a multi-criteria optimization using tree-structured Parzen estimation, an input stage filter for signal noise attenuation combined with a large language model (LLM) applied for time series forecasting. The proposed optimized LLM outperforms state-of-the-art DL models with a root-mean-square error equal to 2.24$\times10^{-4}$ for a short-term horizon and 1.21$\times10^{-3}$ for a medium-term horizon.
3D Multi-Object Tracking Employing MS-GLMB Filter for Autonomous Driving
Oct 19, 2024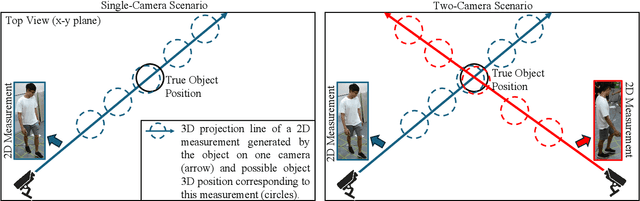
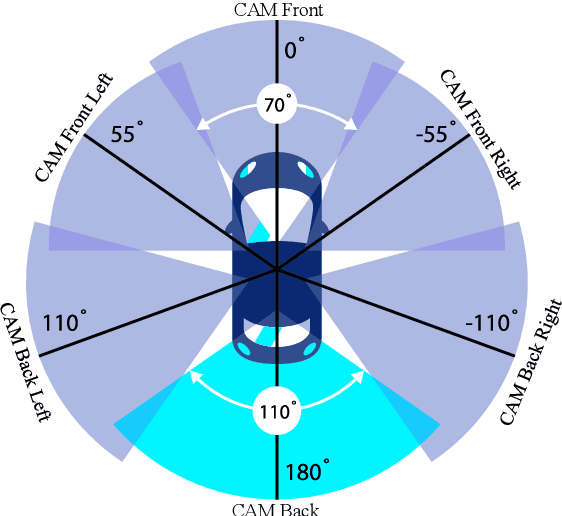
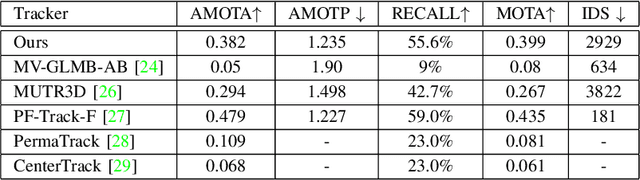
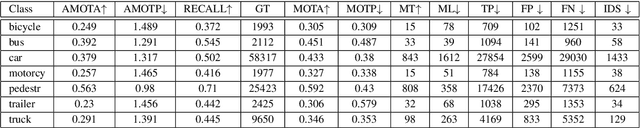
The MS-GLMB filter offers a robust framework for tracking multiple objects through the use of multi-sensor data. Building on this, the MV-GLMB and MV-GLMB-AB filters enhance the MS-GLMB capabilities by employing cameras for 3D multi-sensor multi-object tracking, effectively addressing occlusions. However, both filters depend on overlapping fields of view from the cameras to combine complementary information. In this paper, we introduce an improved approach that integrates an additional sensor, such as LiDAR, into the MS-GLMB framework for 3D multi-object tracking. Specifically, we present a new LiDAR measurement model, along with a multi-camera and LiDAR multi-object measurement model. Our experimental results demonstrate a significant improvement in tracking performance compared to existing MS-GLMB-based methods. Importantly, our method eliminates the need for overlapping fields of view, broadening the applicability of the MS-GLMB filter. Our source code for nuScenes dataset is available at https://github.com/linh-gist/ms-glmb-nuScenes.
Online Multi-Object Tracking Framework with the GMPHD Filter and Occlusion Group Management
Jul 31, 2019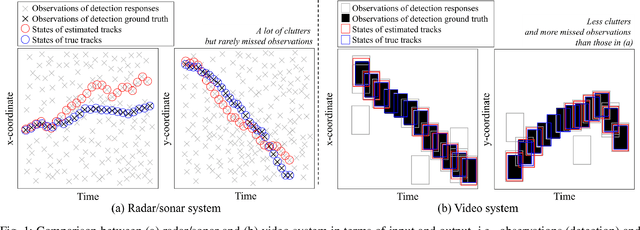
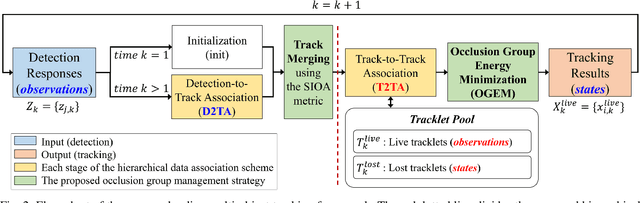
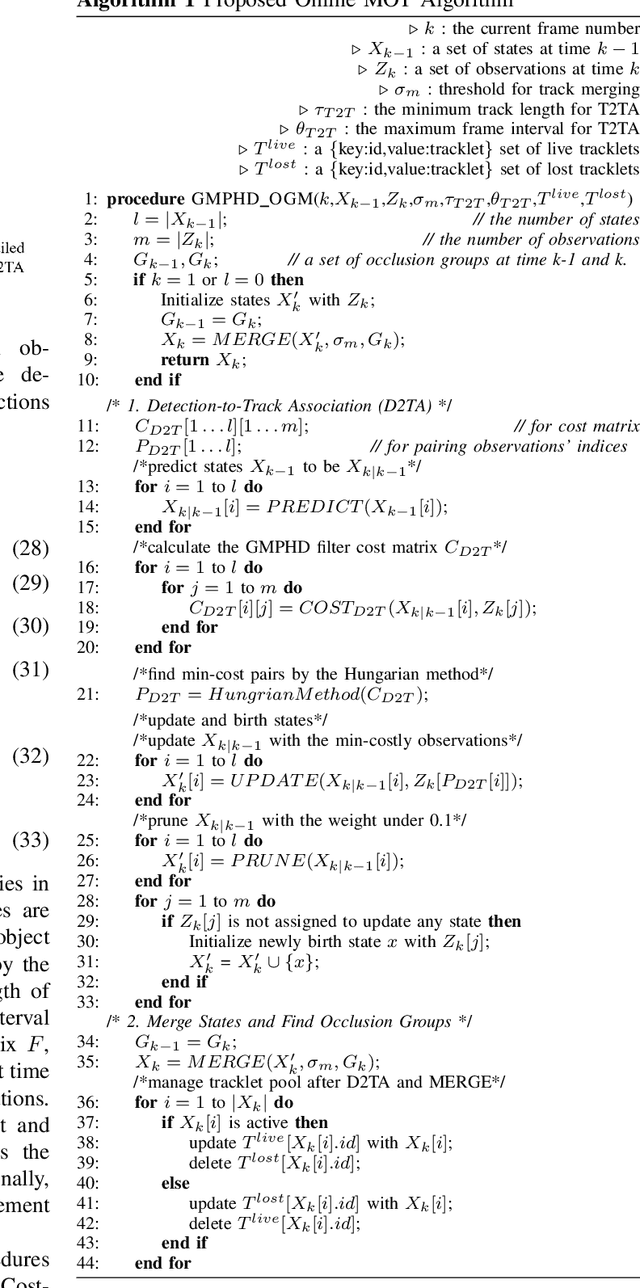
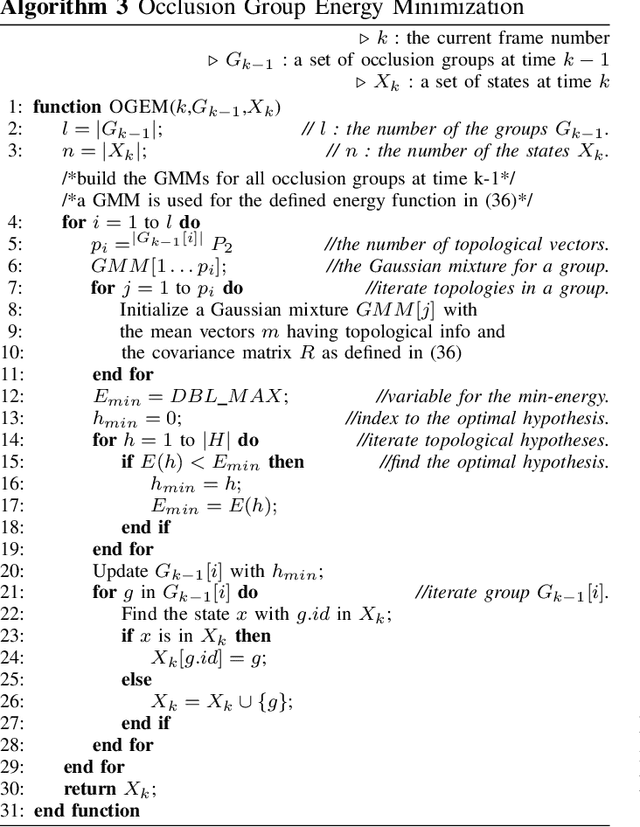
In this paper, we propose an efficient online multi-object tracking framework based on the GMPHD filter and occlusion group management scheme where the GMPHD filter utilizes hierarchical data association to reduce the false negatives caused by miss detection. The hierarchical data association consists of two steps: detection-to-track and track-to-track associations, which can recover the lost tracks and their switched IDs. In addition, the proposed framework is equipped with an object grouping management scheme which handles occlusion problems with two main parts. The first part is "track merging" which can merge the false positive tracks caused by false positive detections from occlusions, where the false positive tracks are usually occluded with a measure. The measure is the occlusion ratio between visual objects, sum-of-intersection-over-area (SIOA) we defined instead of the IOU metric. The second part is "occlusion group energy minimization (OGEM)" which prevents the occluded true positive tracks from false "track merging". We define each group of the occluded objects as an energy function and find an optimal hypothesis which makes the energy minimal. We evaluate the proposed tracker in benchmark datasets such as MOT15 and MOT17 which are built for multi-person tracking. An ablation study in training dataset shows that not only "track merging" and "OGEM" complement each other but also the proposed tracking method has more robust performance and less sensitive to parameters than baseline methods. Also, SIOA works better than IOU for various sizes of false positives. Experimental results show that the proposed tracker efficiently handles occlusion situations and achieves competitive performance compared to the state-of-the-art methods. Especially, our method shows the best multi-object tracking accuracy among the online and real-time executable methods.