 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMGPC: Multimodal Network for Generalizable Point Cloud Completion With Modality Dropout and Progressive Decoding
Jan 07, 2026Point cloud completion aims to recover complete 3D geometry from partial observations caused by limited viewpoints and occlusions. Existing learning-based works, including 3D Convolutional Neural Network (CNN)-based, point-based, and Transformer-based methods, have achieved strong performance on synthetic benchmarks. However, due to the limitations of modality, scalability, and generative capacity, their generalization to novel objects and real-world scenarios remains challenging. In this paper, we propose MGPC, a generalizable multimodal point cloud completion framework that integrates point clouds, RGB images, and text within a unified architecture. MGPC introduces an innovative modality dropout strategy, a Transformer-based fusion module, and a novel progressive generator to improve robustness, scalability, and geometric modeling capability. We further develop an automatic data generation pipeline and construct MGPC-1M, a large-scale benchmark with over 1,000 categories and one million training pairs. Extensive experiments on MGPC-1M and in-the-wild data demonstrate that the proposed method consistently outperforms prior baselines and exhibits strong generalization under real-world conditions.
Video-CoT: A Comprehensive Dataset for Spatiotemporal Understanding of Videos Based on Chain-of-Thought
Jun 12, 2025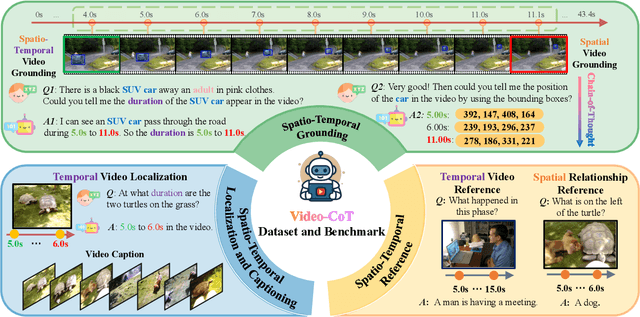
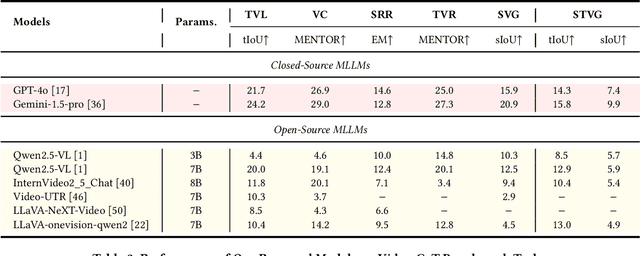
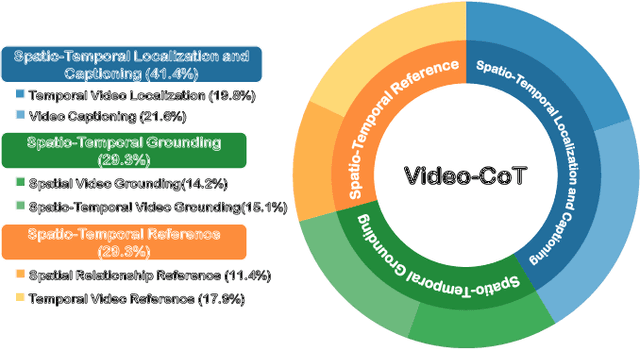

Video content comprehension is essential for various applications, ranging from video analysis to interactive systems. Despite advancements in large-scale vision-language models (VLMs), these models often struggle to capture the nuanced, spatiotemporal details essential for thorough video analysis. To address this gap, we introduce Video-CoT, a groundbreaking dataset designed to enhance spatiotemporal understanding using Chain-of-Thought (CoT) methodologies. Video-CoT contains 192,000 fine-grained spa-tiotemporal question-answer pairs and 23,000 high-quality CoT-annotated samples, providing a solid foundation for evaluating spatiotemporal understanding in video comprehension. Additionally, we provide a comprehensive benchmark for assessing these tasks, with each task featuring 750 images and tailored evaluation metrics. Our extensive experiments reveal that current VLMs face significant challenges in achieving satisfactory performance, high-lighting the difficulties of effective spatiotemporal understanding. Overall, the Video-CoT dataset and benchmark open new avenues for research in multimedia understanding and support future innovations in intelligent systems requiring advanced video analysis capabilities. By making these resources publicly available, we aim to encourage further exploration in this critical area. Project website:https://video-cot.github.io/ .
Monocular Depth Estimation and Segmentation for Transparent Object with Iterative Semantic and Geometric Fusion
Feb 20, 2025Transparent object perception is indispensable for numerous robotic tasks. However, accurately segmenting and estimating the depth of transparent objects remain challenging due to complex optical properties. Existing methods primarily delve into only one task using extra inputs or specialized sensors, neglecting the valuable interactions among tasks and the subsequent refinement process, leading to suboptimal and blurry predictions. To address these issues, we propose a monocular framework, which is the first to excel in both segmentation and depth estimation of transparent objects, with only a single-image input. Specifically, we devise a novel semantic and geometric fusion module, effectively integrating the multi-scale information between tasks. In addition, drawing inspiration from human perception of objects, we further incorporate an iterative strategy, which progressively refines initial features for clearer results. Experiments on two challenging synthetic and real-world datasets demonstrate that our model surpasses state-of-the-art monocular, stereo, and multi-view methods by a large margin of about 38.8%-46.2% with only a single RGB input. Codes and models are publicly available at https://github.com/L-J-Yuan/MODEST.
The Field-of-View Constraint of Markers for Mobile Robot with Pan-Tilt Camera
Sep 24, 2019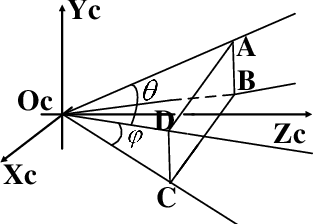
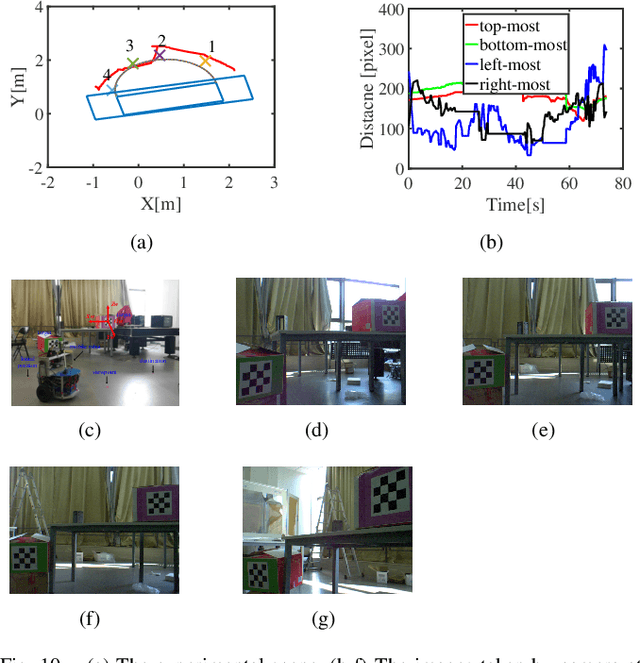
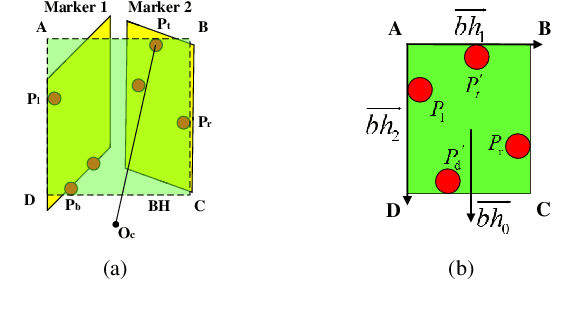
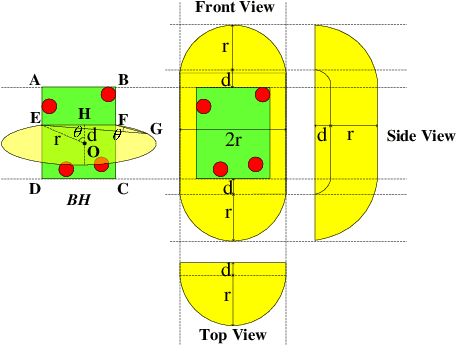
In the field of navigation and visual servo, it is common to calculate relative pose by feature points on markers, so keeping markers in camera's view is an important problem. In this paper, we propose a novel approach to calculate field-of-view (FOV) constraint of markers for camera. Our method can make the camera maintain the visibility of all feature points during the motion of mobile robot. According to the angular aperture of camera, the mobile robot can obtain the FOV constraint region where the camera cannot keep all feature points in an image. Based on the FOV constraint region, the mobile robot can be guided to move from the initial position to destination. Finally simulations and experiments are conducted based on a mobile robot equipped with a pan-tilt camera, which validates the effectiveness of the method to obtain the FOV constraints.
EPOSIT: An Absolute Pose Estimation Method for Pinhole and Fish-Eye Cameras
Sep 19, 2019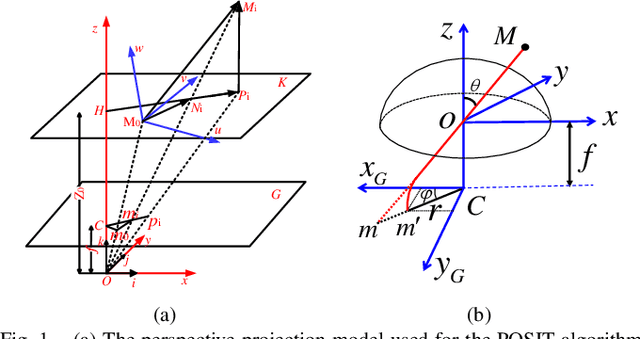
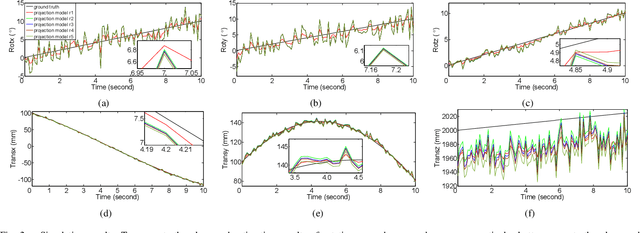
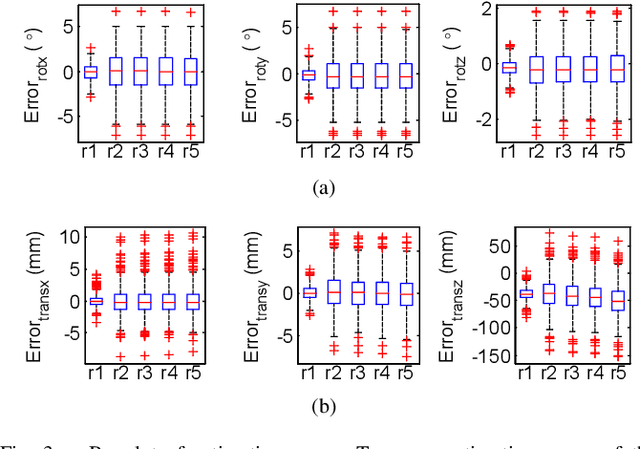
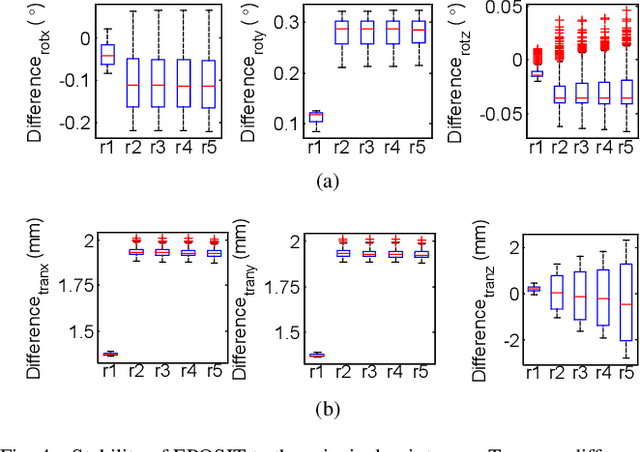
This paper presents a generic 6DOF camera pose estimation method, which can be used for both the pinhole camera and the fish-eye camera. Different from existing methods, relative positions of 3D points rather than absolute coordinates in the world coordinate system are employed in our method, and it has a unique solution. The application scope of POSIT (Pose from Orthography and Scaling with Iteration) algorithm is generalized to fish-eye cameras by combining with the radially symmetric projection model. The image point relationship between the pinhole camera and the fish-eye camera is derived based on their projection model. The general pose expression which fits for different cameras can be acquired by four noncoplanar object points and their corresponding image points. Accurate estimation results are calculated iteratively. Experimental results on synthetic and real data show that the pose estimation results of our method are more stable and accurate than state-of-the-art methods. The source code is available at https://github.com/k032131/EPOSIT.
Human Following for Wheeled Robot with Monocular Pan-tilt Camera
Sep 13, 2019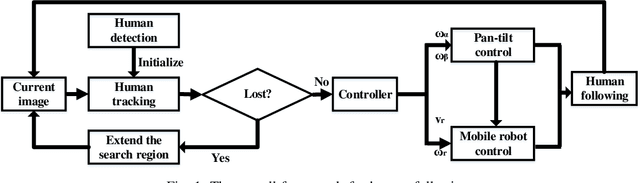
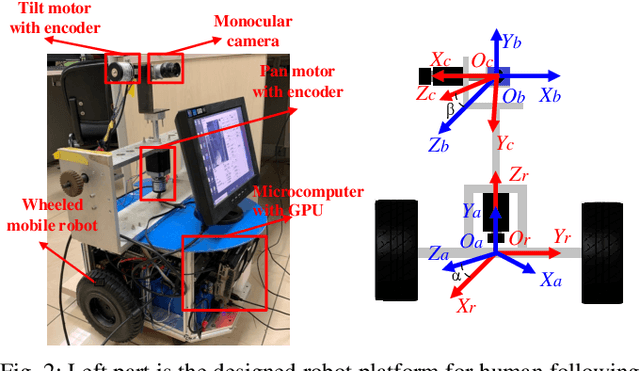

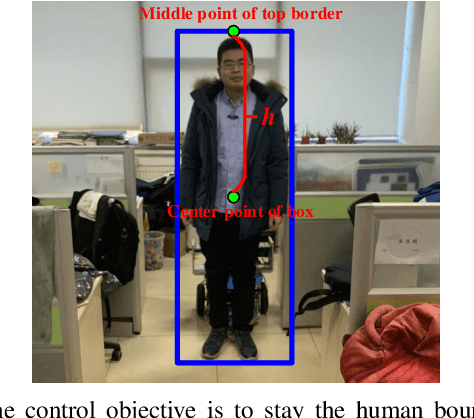
Human following on mobile robots has witnessed significant advances due to its potentials for real-world applications. Currently most human following systems are equipped with depth sensors to obtain distance information between human and robot, which suffer from the perception requirements and noises. In this paper, we design a wheeled mobile robot system with monocular pan-tilt camera to follow human, which can stay the target in the field of view and keep following simultaneously. The system consists of fast human detector, real-time and accurate visual tracker, and unified controller for mobile robot and pan-tilt camera. In visual tracking algorithm, both Siamese networks and optical flow information are exploited to locate and regress human simultaneously. In order in perform following with a monocular camera, the constraint of human height is introduced to design the controller. In experiments, human following are conducted and analysed in simulations and a real robot platform, which demonstrate the effectiveness and robustness of the overall system.