 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCross-Modality Embedding of Force and Language for Natural Human-Robot Communication
Feb 04, 2025



A method for cross-modality embedding of force profile and words is presented for synergistic coordination of verbal and haptic communication. When two people carry a large, heavy object together, they coordinate through verbal communication about the intended movements and physical forces applied to the object. This natural integration of verbal and physical cues enables effective coordination. Similarly, human-robot interaction could achieve this level of coordination by integrating verbal and haptic communication modalities. This paper presents a framework for embedding words and force profiles in a unified manner, so that the two communication modalities can be integrated and coordinated in a way that is effective and synergistic. Here, it will be shown that, although language and physical force profiles are deemed completely different, the two can be embedded in a unified latent space and proximity between the two can be quantified. In this latent space, a force profile and words can a) supplement each other, b) integrate the individual effects, and c) substitute in an exchangeable manner. First, the need for cross-modality embedding is addressed, and the basic architecture and key building block technologies are presented. Methods for data collection and implementation challenges will be addressed, followed by experimental results and discussions.
Underwater Intention Recognition using Head Motion and Throat Vibration for Supernumerary Robotic Assistance
Jun 08, 2023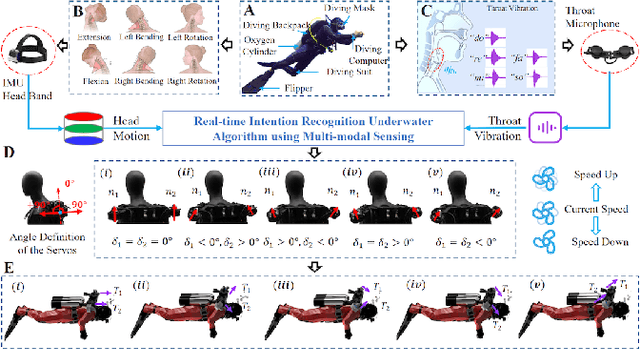
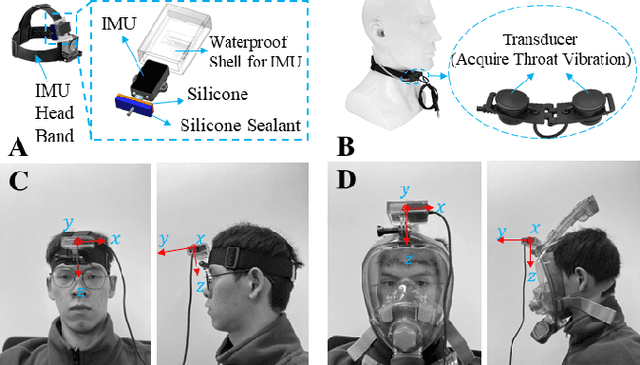
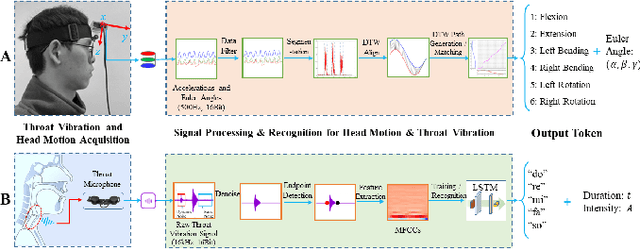
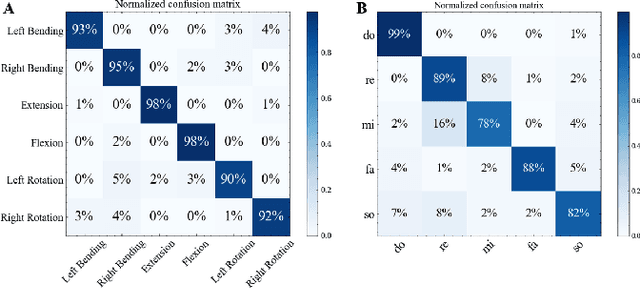
This study presents a multi-modal mechanism for recognizing human intentions while diving underwater, aiming to achieve natural human-robot interactions through an underwater superlimb for diving assistance. The underwater environment severely limits the divers' capabilities in intention expression, which becomes more challenging when they intend to operate tools while keeping control of body postures in 3D with the various diving suits and gears. The current literature is limited in underwater intention recognition, impeding the development of intelligent wearable systems for human-robot interactions underwater. Here, we present a novel solution to simultaneously detect head motion and throat vibrations under the water in a compact, wearable design. Experiment results show that using machine learning algorithms, we achieved high performance in integrating these two modalities to translate human intentions to robot control commands for an underwater superlimb system. This study's results paved the way for future development in underwater intention recognition and underwater human-robot interactions with supernumerary support.
Handle Anywhere: A Mobile Robot Arm for Providing Bodily Support to Elderly Persons
Sep 30, 2022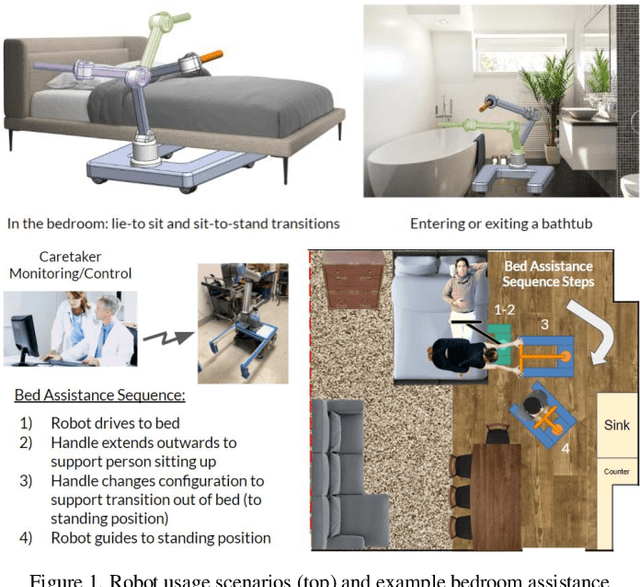
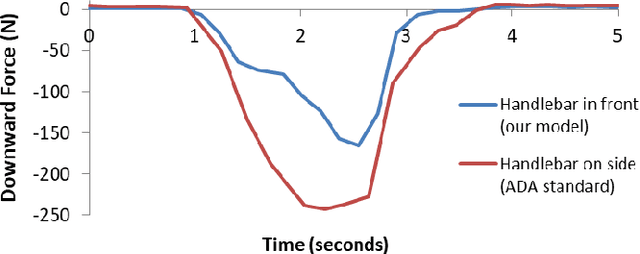
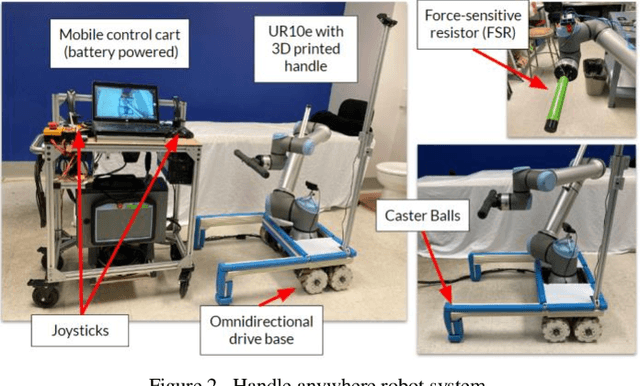
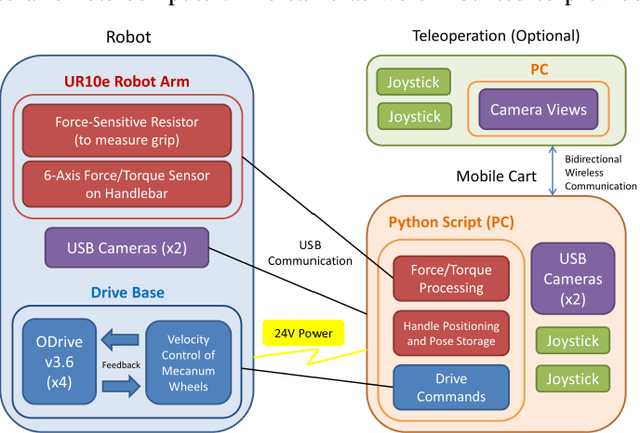
Age-related loss of mobility and increased risk of falling remain important obstacles toward facilitating aging-in-place. Many elderly people lack the coordination and strength necessary to perform common movements around their home, such as getting out of bed or stepping into a bathtub. The traditional solution has been to install grab bars on various surfaces; however, these are often not placed in optimal locations due to feasibility constraints in room layout. In this paper, we present a mobile robot that provides an older adult with a handle anywhere in space - "handle anywhere". The robot consists of an omnidirectional mobile base attached to a repositionable handle. We analyze the postural changes in four activities of daily living and determine, in each, the body pose that requires the maximal muscle effort. Using a simple model of the human body, we develop a methodology to optimally place the handle to provide the maximum support for the elderly person at the point of most effort. Our model is validated with experimental trials. We discuss how the robotic device could be used to enhance patient mobility and reduce the incidence of falls.
Global, Unified Representation of Heterogenous Robot Dynamics Using Composition Operators
Jul 30, 2022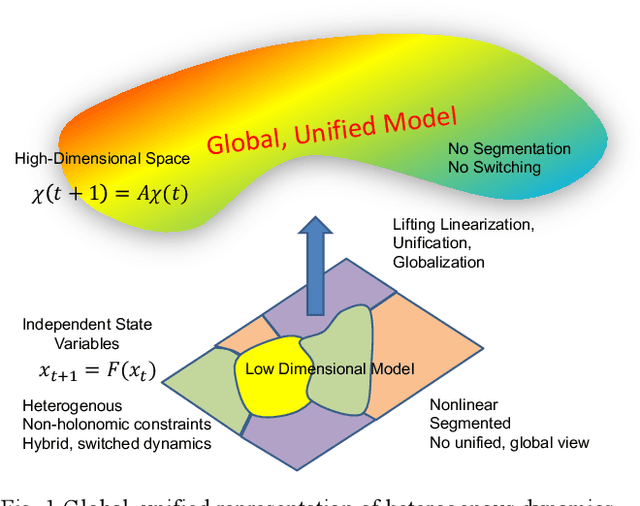
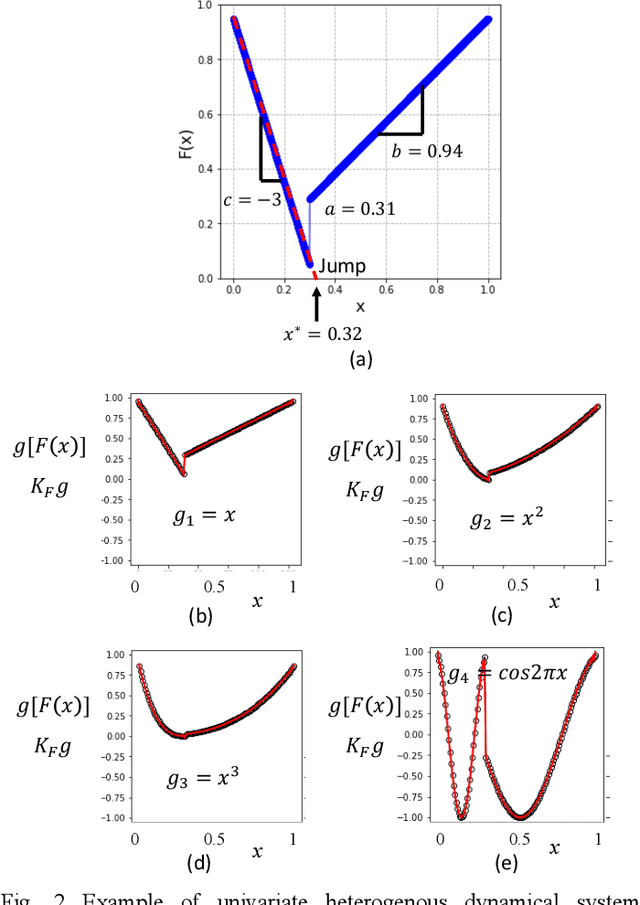
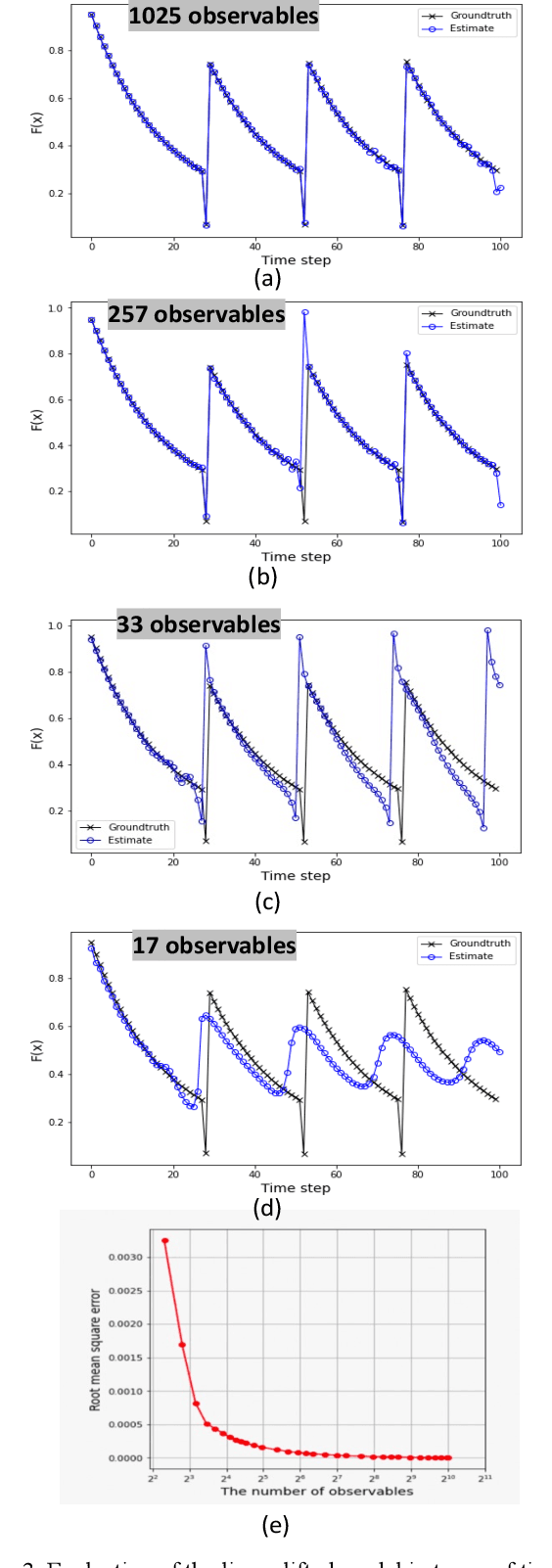
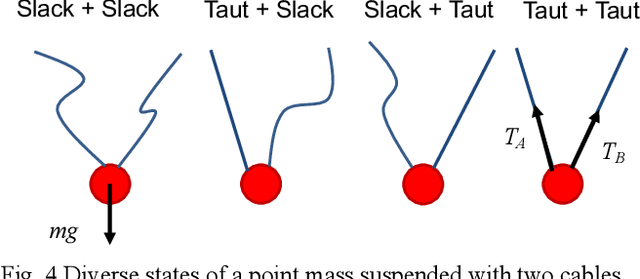
The complexity of robot dynamics often pertains to the hybrid nature of dynamics, where governing dynamic equations consist of heterogenous equations that are switched depending on the state of the system. Legged robots and manipulator robots experience contact-noncontact discrete transitions, causing switching of governing equations. Analysis of these robot systems have been a challenge due to the lack of a global, unified model that is amenable to analysis of the global behaviors. Composition operator theory has the potential to provide a global, unified representation of those heterogenous dynamical systems. It is expected that, if the theory is applicable, those fundamentally challenging robotics systems can be treated as linear dynamical systems in a lifted space. The current work addresses under which conditions a unified linear representation exists in a global sense for a class of heterogenous dynamical systems and how the theory can be applied to those robotics problems. First, a kernel representation of composition operators is obtained, and conditions required for converting the kernel representation to a linear state transition equation are established. This analysis results in an algorithm to convert a class of heterogenous systems including hybrid and switched systems directly to a global, unified linear model. Unlike prevalent data-driven methods and Dynamic Mode Decomposition, where results can vary depending on numerical data, the proposed method does not require numerical simulation of the original dynamics. The implication of the new method and its impact upon robotics are discussed. A few examples validate and demonstrate the method.
Robotic Cane as a Soft SuperLimb for Elderly Sit-to-Stand Assistance
Feb 29, 2020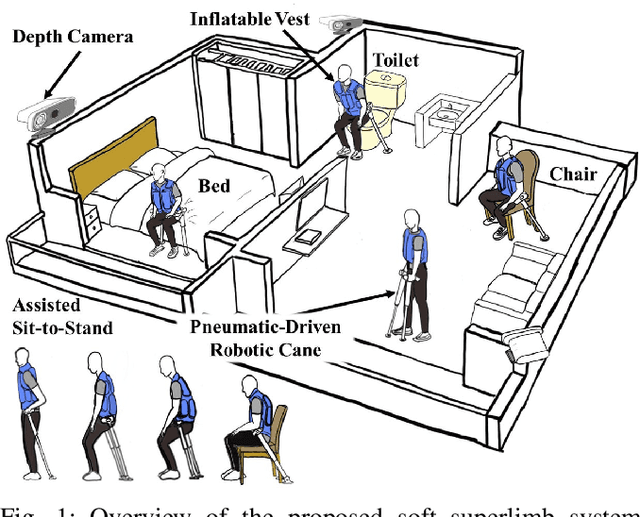
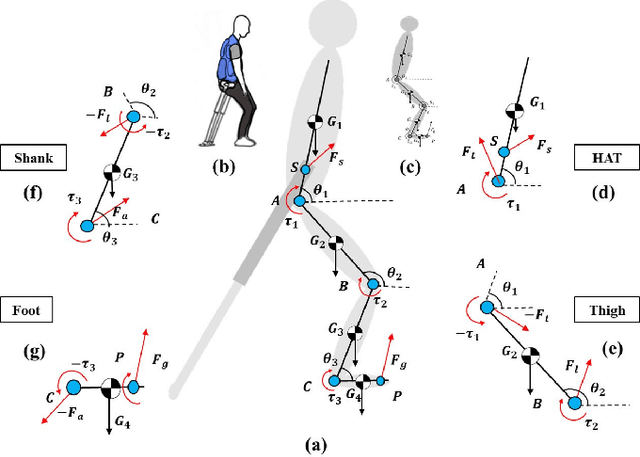
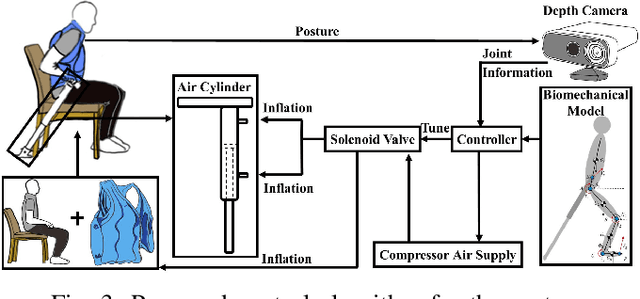
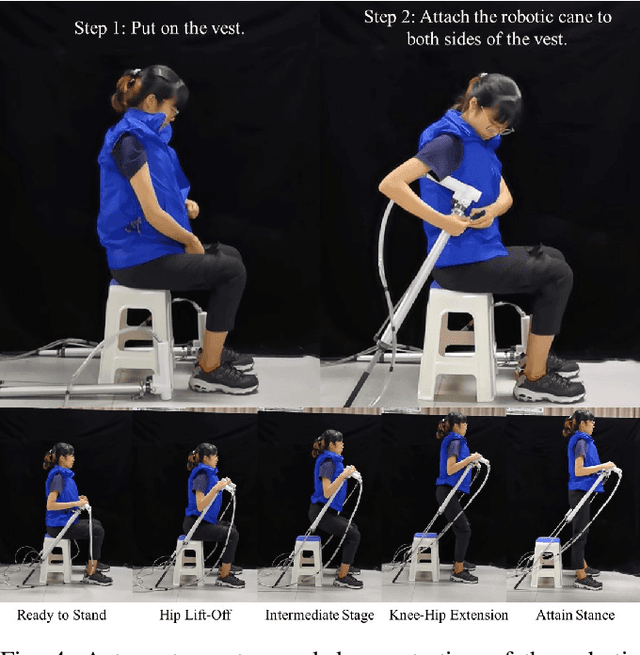
Many researchers have identified robotics as a potential solution to the aging population faced by many developed and developing countries. If so, how should we address the cognitive acceptance and ambient control of elderly assistive robots through design? In this paper, we proposed an explorative design of an ambient SuperLimb (Supernumerary Robotic Limb) system that involves a pneumatically-driven robotic cane for at-home motion assistance, an inflatable vest for compliant human-robot interaction, and a depth sensor for ambient intention detection. The proposed system aims at providing active assistance during the sit-to-stand transition for at-home usage by the elderly at the bedside, in the chair, and on the toilet. We proposed a modified biomechanical model with a linear cane robot for closed-loop control implementation. We validated the design feasibility of the proposed ambient SuperLimb system including the biomechanical model, our result showed the advantages in reducing lower limb efforts and elderly fall risks, yet the detection accuracy using depth sensing and adjustments on the model still require further research in the future. Nevertheless, we summarized empirical guidelines to support the ambient design of elderly-assistive SuperLimb systems for lower limb functional augmentation.