 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHandle Anywhere: A Mobile Robot Arm for Providing Bodily Support to Elderly Persons
Paper and Code
Sep 30, 2022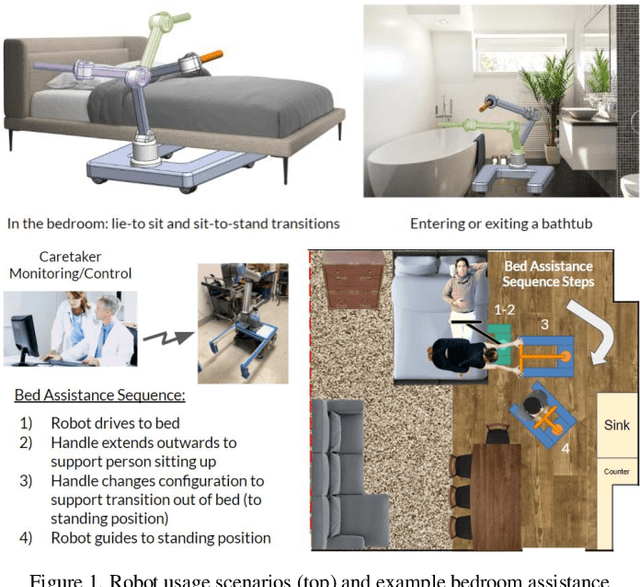
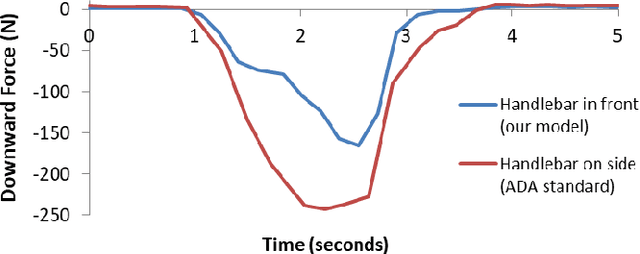
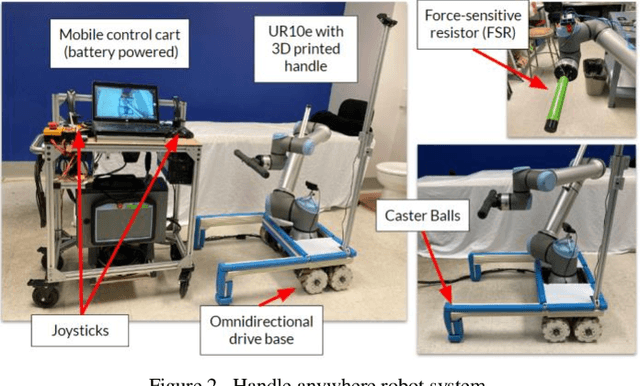
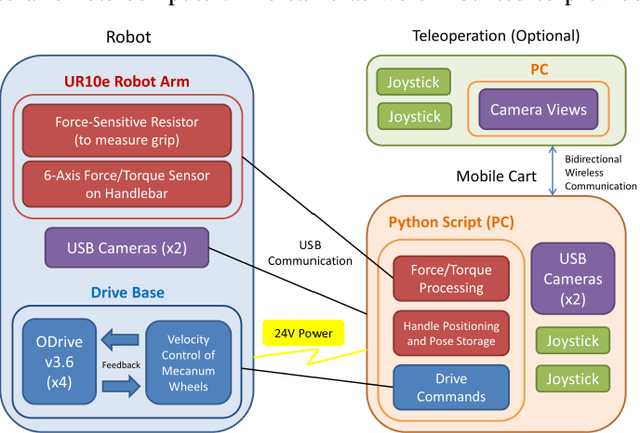
Age-related loss of mobility and increased risk of falling remain important obstacles toward facilitating aging-in-place. Many elderly people lack the coordination and strength necessary to perform common movements around their home, such as getting out of bed or stepping into a bathtub. The traditional solution has been to install grab bars on various surfaces; however, these are often not placed in optimal locations due to feasibility constraints in room layout. In this paper, we present a mobile robot that provides an older adult with a handle anywhere in space - "handle anywhere". The robot consists of an omnidirectional mobile base attached to a repositionable handle. We analyze the postural changes in four activities of daily living and determine, in each, the body pose that requires the maximal muscle effort. Using a simple model of the human body, we develop a methodology to optimally place the handle to provide the maximum support for the elderly person at the point of most effort. Our model is validated with experimental trials. We discuss how the robotic device could be used to enhance patient mobility and reduce the incidence of falls.