 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRDEx-CASK: Cauchy Mutation, Archive, and Stagnation Kick for RDEx-CSOP
May 10, 2026We extend RDEx-CSOP with 3 changes that target stagnation & late-stage variance, plus minor parameter tuning. The second scale factor in the standard branch is sampled independently from a truncated Cauchy. A small feasible-only JADE-style archive (|A|_max = 50) is added & sampled with probability |A|/(|A|+|P|). Per-individual stagnation counter triggers, after 180 no-improvement generations, three local overrides on standard branch: pull toward the global best, lift the archive sampling floor to 0.65, & saturate CR to 0.95 when population success rate is below 0.10. The exploitation biased branch & every other RDEx component are left untouched. On CEC CSOP suite (D=30, 25 runs), RDEx-CASK is competitive with RDEx, UDE-III, & CL-SRDE in feasibility-aware quality & improves time-to-target on most problems.
CrackUDA: Incremental Unsupervised Domain Adaptation for Improved Crack Segmentation in Civil Structures
Dec 20, 2024Crack segmentation plays a crucial role in ensuring the structural integrity and seismic safety of civil structures. However, existing crack segmentation algorithms encounter challenges in maintaining accuracy with domain shifts across datasets. To address this issue, we propose a novel deep network that employs incremental training with unsupervised domain adaptation (UDA) using adversarial learning, without a significant drop in accuracy in the source domain. Our approach leverages an encoder-decoder architecture, consisting of both domain-invariant and domain-specific parameters. The encoder learns shared crack features across all domains, ensuring robustness to domain variations. Simultaneously, the decoder's domain-specific parameters capture domain-specific features unique to each domain. By combining these components, our model achieves improved crack segmentation performance. Furthermore, we introduce BuildCrack, a new crack dataset comparable to sub-datasets of the well-established CrackSeg9K dataset in terms of image count and crack percentage. We evaluate our proposed approach against state-of-the-art UDA methods using different sub-datasets of CrackSeg9K and our custom dataset. Our experimental results demonstrate a significant improvement in crack segmentation accuracy and generalization across target domains compared to other UDA methods - specifically, an improvement of 0.65 and 2.7 mIoU on source and target domains respectively.
Attention Meets UAVs: A Comprehensive Evaluation of DDoS Detection in Low-Cost UAVs
Jun 28, 2024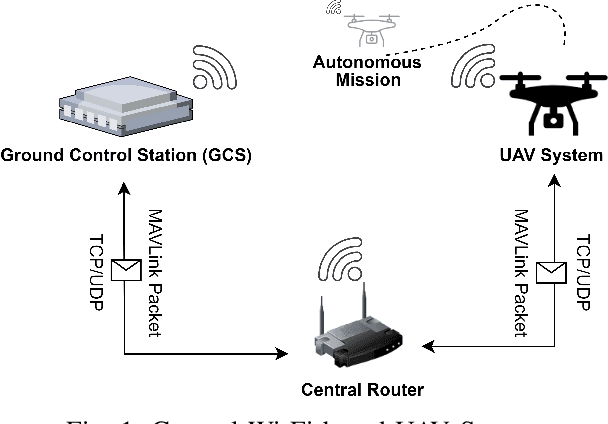
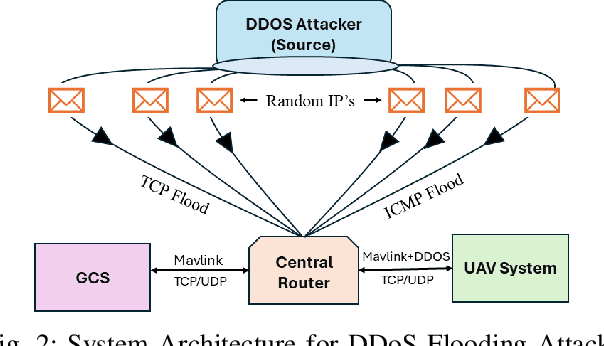
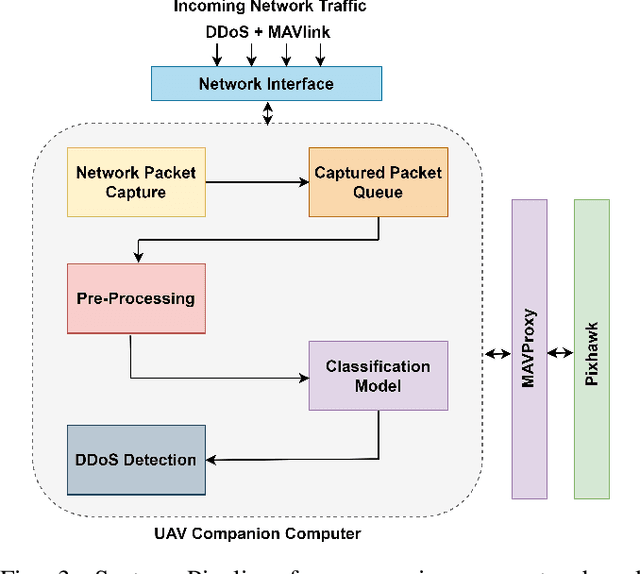
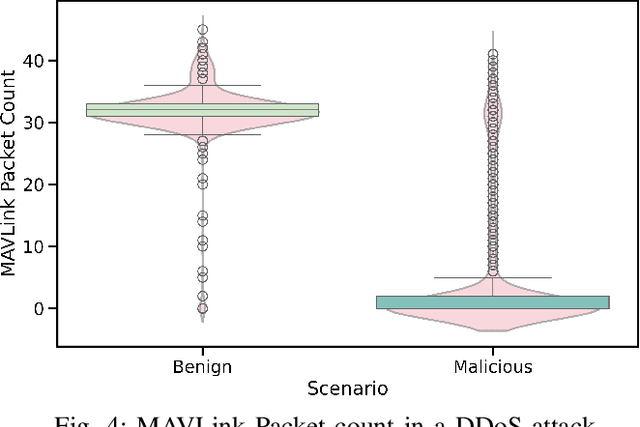
This paper explores the critical issue of enhancing cybersecurity measures for low-cost, Wi-Fi-based Unmanned Aerial Vehicles (UAVs) against Distributed Denial of Service (DDoS) attacks. In the current work, we have explored three variants of DDoS attacks, namely Transmission Control Protocol (TCP), Internet Control Message Protocol (ICMP), and TCP + ICMP flooding attacks, and developed a detection mechanism that runs on the companion computer of the UAV system. As a part of the detection mechanism, we have evaluated various machine learning, and deep learning algorithms, such as XGBoost, Isolation Forest, Long Short-Term Memory (LSTM), Bidirectional-LSTM (Bi-LSTM), LSTM with attention, Bi-LSTM with attention, and Time Series Transformer (TST) in terms of various classification metrics. Our evaluation reveals that algorithms with attention mechanisms outperform their counterparts in general, and TST stands out as the most efficient model with a run time of 0.1 seconds. TST has demonstrated an F1 score of 0.999, 0.997, and 0.943 for TCP, ICMP, and TCP + ICMP flooding attacks respectively. In this work, we present the necessary steps required to build an on-board DDoS detection mechanism. Further, we also present the ablation study to identify the best TST hyperparameters for DDoS detection, and we have also underscored the advantage of adapting learnable positional embeddings in TST for DDoS detection with an improvement in F1 score from 0.94 to 0.99.
RaCIL: Ray Tracing based Multi-UAV Obstacle Avoidance through Composite Imitation Learning
Jun 24, 2024In this study, we address the challenge of obstacle avoidance for Unmanned Aerial Vehicles (UAVs) through an innovative composite imitation learning approach that combines Proximal Policy Optimization (PPO) with Behavior Cloning (BC) and Generative Adversarial Imitation Learning (GAIL), enriched by the integration of ray-tracing techniques. Our research underscores the significant role of ray-tracing in enhancing obstacle detection and avoidance capabilities. Moreover, we demonstrate the effectiveness of incorporating GAIL in coordinating the flight paths of two UAVs, showcasing improved collision avoidance capabilities. Extending our methodology, we apply our combined PPO, BC, GAIL, and ray-tracing framework to scenarios involving four UAVs, illustrating its scalability and adaptability to more complex scenarios. The findings indicate that our approach not only improves the reliability of basic PPO based obstacle avoidance but also paves the way for advanced autonomous UAV operations in crowded or dynamic environments.
Vision based UAV Navigation through Narrow Passages
Mar 28, 2023This research paper presents a novel approach for navigating a micro UAV (Unmanned Aerial Vehicle) through narrow passages using only its onboard camera feed and a PID control system. The proposed method uses edge detection and homography techniques to extract the key features of the passage from the camera feed and then employs a tuned PID controller to guide the UAV through and out of the passage while avoiding collisions with the walls. To evaluate the effectiveness of the proposed approach, a series of experiments were conducted using a micro-UAV navigating in and out of a custom-built test environment (constrained rectangular box). The results demonstrate that the system is able to successfully guide the UAV through the passages while avoiding collisions with the walls.
Control Barrier Function-based Predictive Control for Close Proximity operation of UAVs inside a Tunnel
Mar 28, 2023



This paper introduces a method for effectively controlling the movement of an Unmanned Aerial Vehicle (UAV) within a tunnel. The primary challenge of this problem lies in the UAV's exposure to nonlinear distance-dependent torques and forces generated by the tunnel walls, along with the need to operate safely within a defined region while in close proximity to these walls. To address this problem, the paper proposes the implementation of a Model Predictive Control (MPC) framework with constraints based on Control Barrier Function (CBF). The paper approaches the issue in two distinct ways; first, by maintaining a safe distance from the tunnel walls to avoid the effects of both the walls and ceiling, and second, by minimizing the distance from the walls to effectively manage the nonlinear forces associated with close proximity tasks. Finally, the paper demonstrates the effectiveness of its approach through testing on simulation for various close proximity trajectories with the realistic model of aerodynamic disturbances due to the proximity of the ceiling and boundary walls.
Sim-to-Real Deep Reinforcement Learning based Obstacle Avoidance for UAVs under Measurement Uncertainty
Mar 13, 2023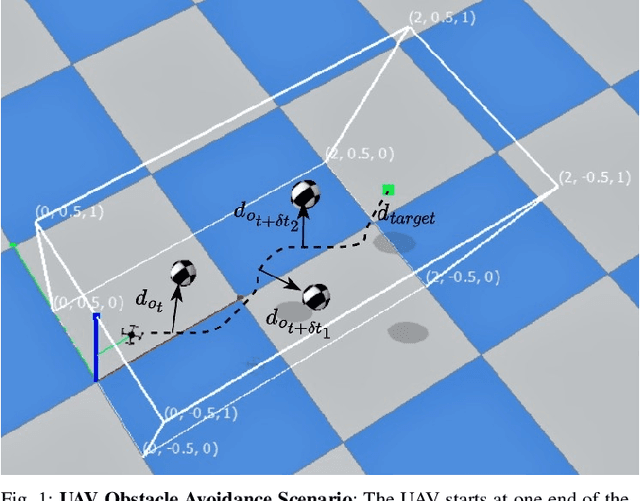
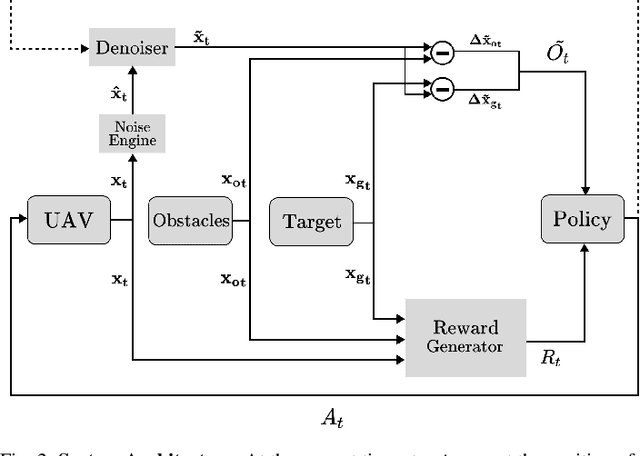
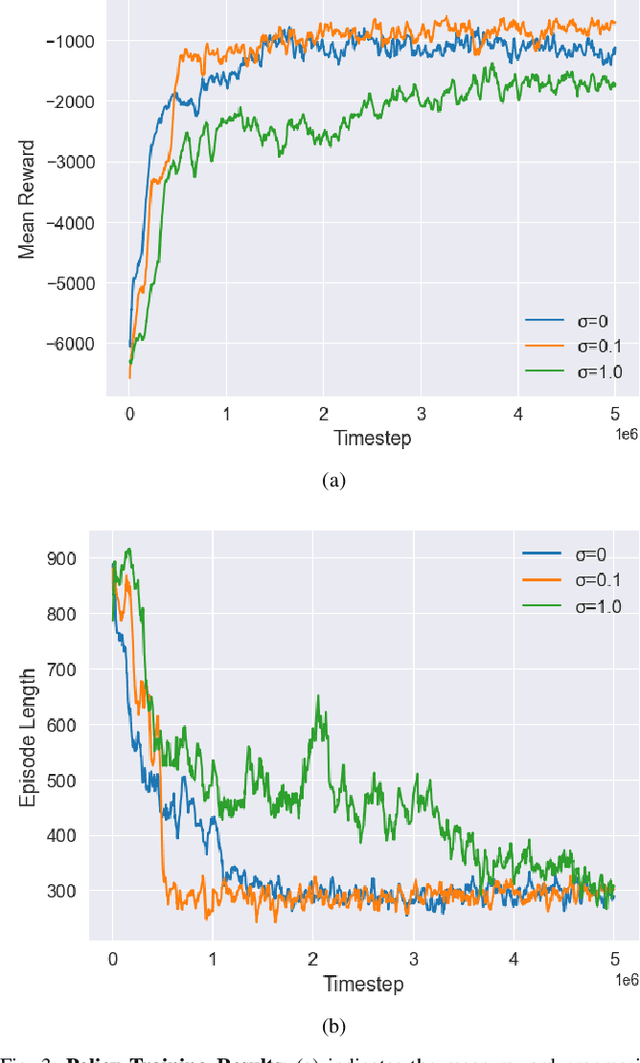
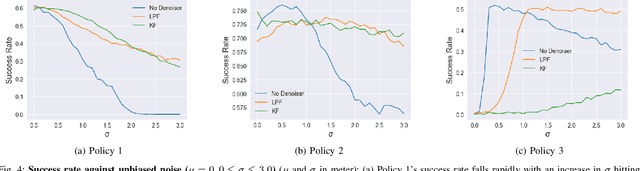
Deep Reinforcement Learning is quickly becoming a popular method for training autonomous Unmanned Aerial Vehicles (UAVs). Our work analyzes the effects of measurement uncertainty on the performance of Deep Reinforcement Learning (DRL) based waypoint navigation and obstacle avoidance for UAVs. Measurement uncertainty originates from noise in the sensors used for localization and detecting obstacles. Measurement uncertainty/noise is considered to follow a Gaussian probability distribution with unknown non-zero mean and variance. We evaluate the performance of a DRL agent trained using the Proximal Policy Optimization (PPO) algorithm in an environment with continuous state and action spaces. The environment is randomized with different numbers of obstacles for each simulation episode in the presence of varying degrees of noise, to capture the effects of realistic sensor measurements. Denoising techniques like the low pass filter and Kalman filter improve performance in the presence of unbiased noise. Moreover, we show that artificially injecting noise into the measurements during evaluation actually improves performance in certain scenarios. Extensive training and testing of the DRL agent under various UAV navigation scenarios are performed in the PyBullet physics simulator. To evaluate the practical validity of our method, we port the policy trained in simulation onto a real UAV without any further modifications and verify the results in a real-world environment.
RRT and Velocity Obstacles-based motion planning for Unmanned Aircraft Systems Traffic Management (UTM)
Feb 28, 2023



In this paper, an algorithm for Unmanned Aircraft Systems Traffic Management (UTM) for a finite number of unmanned aerial vehicles (UAVs) is proposed. This algorithm is developed by combining the Rapidly-Exploring Random Trees (RRT) and Velocity Obstacle (VO) algorithms and is referred to as the RRT-VO UTM algorithm. Here, the RRT algorithm works offline to generate obstacle-free waypoints in a given environment with known static obstacles. The VO algorithm, on the other hand, operates online to avoid collisions with other UAVS and known static obstacles. The boundary of the static obstacles are approximated by small circles to facilitate the formulation of VO algorithm. The proposed algorithm's performance is evaluated using numerical simulation and then compared to the well-known artificial potential field (APF) algorithm for collision avoidance. The advantages of the proposed method are clearly shown in terms of lower path length and collision avoidance capabilities for a challenging scenario.
Predictive Barrier Lyapunov Function Based Control for Safe Trajectory Tracking of an Aerial Manipulator
Dec 09, 2022



This paper proposes a novel controller framework that provides trajectory tracking for an Aerial Manipulator (AM) while ensuring the safe operation of the system under unknown bounded disturbances. The AM considered here is a 2-DOF (degrees-of-freedom) manipulator rigidly attached to a UAV. Our proposed controller structure follows the conventional inner loop PID control for attitude dynamics and an outer loop controller for tracking a reference trajectory. The outer loop control is based on the Model Predictive Control (MPC) with constraints derived using the Barrier Lyapunov Function (BLF) for the safe operation of the AM. BLF-based constraints are proposed for two objectives, viz. 1) To avoid the AM from colliding with static obstacles like a rectangular wall, and 2) To maintain the end effector of the manipulator within the desired workspace. The proposed BLF ensures that the above-mentioned objectives are satisfied even in the presence of unknown bounded disturbances. The capabilities of the proposed controller are demonstrated through high-fidelity non-linear simulations with parameters derived from a real laboratory scale AM. We compare the performance of our controller with other state-of-the-art MPC controllers for AM.
UAV-based Visual Remote Sensing for Automated Building Inspection
Sep 27, 2022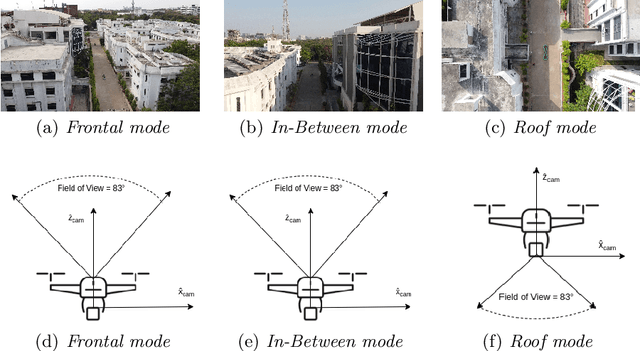
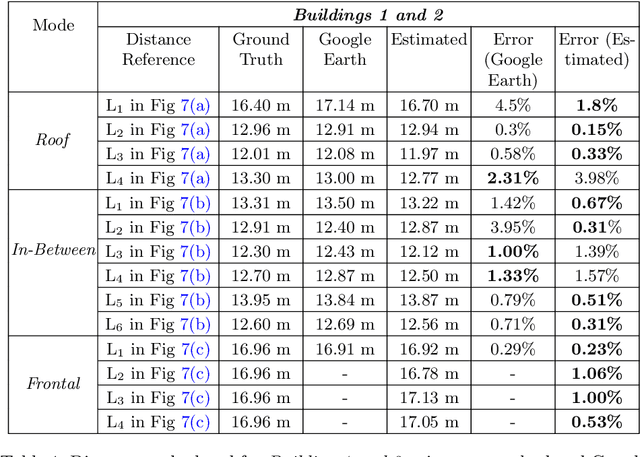
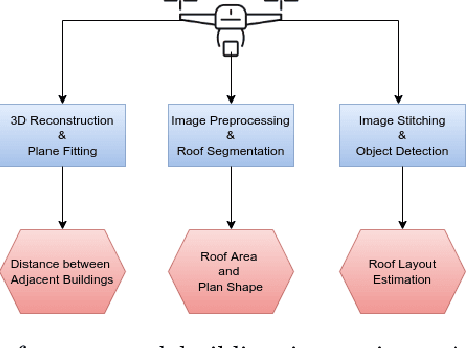
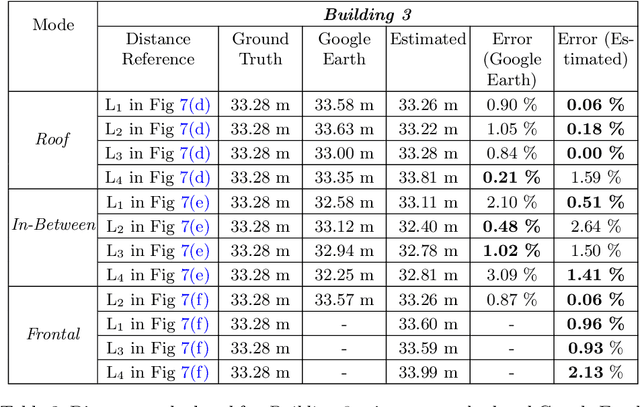
Unmanned Aerial Vehicle (UAV) based remote sensing system incorporated with computer vision has demonstrated potential for assisting building construction and in disaster management like damage assessment during earthquakes. The vulnerability of a building to earthquake can be assessed through inspection that takes into account the expected damage progression of the associated component and the component's contribution to structural system performance. Most of these inspections are done manually, leading to high utilization of manpower, time, and cost. This paper proposes a methodology to automate these inspections through UAV-based image data collection and a software library for post-processing that helps in estimating the seismic structural parameters. The key parameters considered here are the distances between adjacent buildings, building plan-shape, building plan area, objects on the rooftop and rooftop layout. The accuracy of the proposed methodology in estimating the above-mentioned parameters is verified through field measurements taken using a distance measuring sensor and also from the data obtained through Google Earth. Additional details and code can be accessed from https://uvrsabi.github.io/ .