 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVision based UAV Navigation through Narrow Passages
Mar 28, 2023This research paper presents a novel approach for navigating a micro UAV (Unmanned Aerial Vehicle) through narrow passages using only its onboard camera feed and a PID control system. The proposed method uses edge detection and homography techniques to extract the key features of the passage from the camera feed and then employs a tuned PID controller to guide the UAV through and out of the passage while avoiding collisions with the walls. To evaluate the effectiveness of the proposed approach, a series of experiments were conducted using a micro-UAV navigating in and out of a custom-built test environment (constrained rectangular box). The results demonstrate that the system is able to successfully guide the UAV through the passages while avoiding collisions with the walls.
Improved Adaptive Type-2 Fuzzy Filter with Exclusively Two Fuzzy Membership Function for Filtering Salt and Pepper Noise
Aug 10, 2020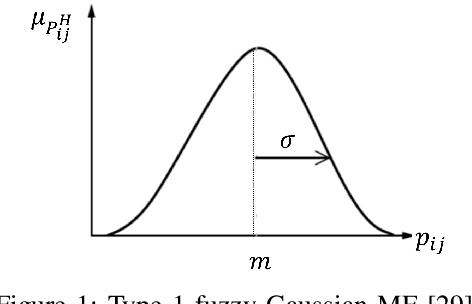
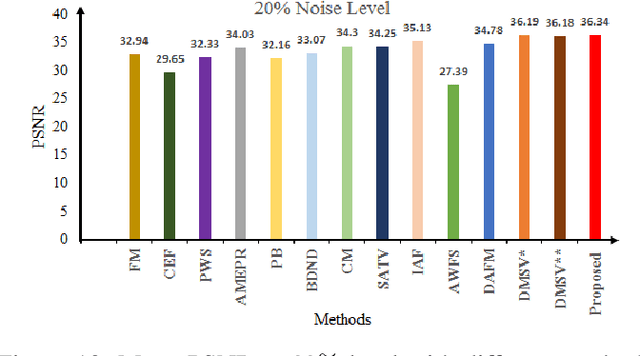
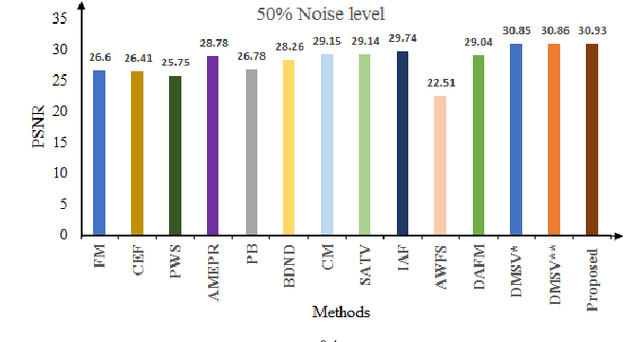
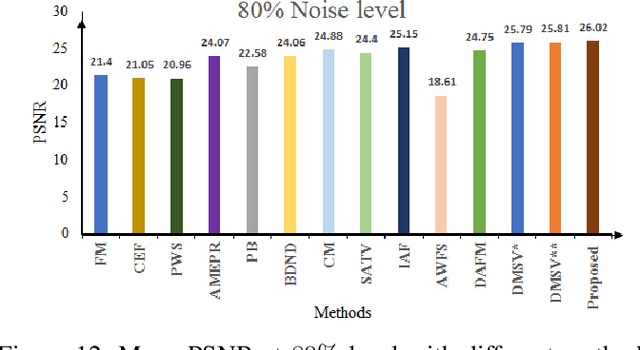
Image denoising is one of the preliminary steps in image processing methods in which the presence of noise can deteriorate the image quality. To overcome this limitation, in this paper a improved two-stage fuzzy filter is proposed for filtering salt and pepper noise from the images. In the first-stage, the pixels in the image are categorized as good or noisy based on adaptive thresholding using type-2 fuzzy logic with exclusively two different membership functions in the filter window. In the second-stage, the noisy pixels are denoised using modified ordinary fuzzy logic in the respective filter window. The proposed filter is validated on standard images with various noise levels. The proposed filter removes the noise and preserves useful image characteristics, i.e., edges and corners at higher noise level. The performance of the proposed filter is compared with the various state-of-the-art methods in terms of peak signal-to-noise ratio and computation time. To show the effectiveness of filter statistical tests, i.e., Friedman test and Bonferroni-Dunn (BD) test are also carried out which clearly ascertain that the proposed filter outperforms in comparison of various filtering approaches.