 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-agent Multi-armed Bandits with Minimum Reward Guarantee Fairness
Feb 21, 2025We investigate the problem of maximizing social welfare while ensuring fairness in a multi-agent multi-armed bandit (MA-MAB) setting. In this problem, a centralized decision-maker takes actions over time, generating random rewards for various agents. Our goal is to maximize the sum of expected cumulative rewards, a.k.a. social welfare, while ensuring that each agent receives an expected reward that is at least a constant fraction of the maximum possible expected reward. Our proposed algorithm, RewardFairUCB, leverages the Upper Confidence Bound (UCB) technique to achieve sublinear regret bounds for both fairness and social welfare. The fairness regret measures the positive difference between the minimum reward guarantee and the expected reward of a given policy, whereas the social welfare regret measures the difference between the social welfare of the optimal fair policy and that of the given policy. We show that RewardFairUCB algorithm achieves instance-independent social welfare regret guarantees of $\tilde{O}(T^{1/2})$ and a fairness regret upper bound of $\tilde{O}(T^{3/4})$. We also give the lower bound of $\Omega(\sqrt{T})$ for both social welfare and fairness regret. We evaluate RewardFairUCB's performance against various baseline and heuristic algorithms using simulated data and real world data, highlighting trade-offs between fairness and social welfare regrets.
Extrapolative ML Models for Copolymers
Sep 15, 2024



Machine learning models have been progressively used for predicting materials properties. These models can be built using pre-existing data and are useful for rapidly screening the physicochemical space of a material, which is astronomically large. However, ML models are inherently interpolative, and their efficacy for searching candidates outside a material's known range of property is unresolved. Moreover, the performance of an ML model is intricately connected to its learning strategy and the volume of training data. Here, we determine the relationship between the extrapolation ability of an ML model, the size and range of its training dataset, and its learning approach. We focus on a canonical problem of predicting the properties of a copolymer as a function of the sequence of its monomers. Tree search algorithms, which learn the similarity between polymer structures, are found to be inefficient for extrapolation. Conversely, the extrapolation capability of neural networks and XGBoost models, which attempt to learn the underlying functional correlation between the structure and property of polymers, show strong correlations with the volume and range of training data. These findings have important implications on ML-based new material development.
Gaze-Vector Estimation in the Dark with Temporally Encoded Event-driven Neural Networks
Mar 05, 2024



In this paper, we address the intricate challenge of gaze vector prediction, a pivotal task with applications ranging from human-computer interaction to driver monitoring systems. Our innovative approach is designed for the demanding setting of extremely low-light conditions, leveraging a novel temporal event encoding scheme, and a dedicated neural network architecture. The temporal encoding method seamlessly integrates Dynamic Vision Sensor (DVS) events with grayscale guide frames, generating consecutively encoded images for input into our neural network. This unique solution not only captures diverse gaze responses from participants within the active age group but also introduces a curated dataset tailored for low-light conditions. The encoded temporal frames paired with our network showcase impressive spatial localization and reliable gaze direction in their predictions. Achieving a remarkable 100-pixel accuracy of 100%, our research underscores the potency of our neural network to work with temporally consecutive encoded images for precise gaze vector predictions in challenging low-light videos, contributing to the advancement of gaze prediction technologies.
Human Shape and Clothing Estimation
Feb 28, 2024



Human shape and clothing estimation has gained significant prominence in various domains, including online shopping, fashion retail, augmented reality (AR), virtual reality (VR), and gaming. The visual representation of human shape and clothing has become a focal point for computer vision researchers in recent years. This paper presents a comprehensive survey of the major works in the field, focusing on four key aspects: human shape estimation, fashion generation, landmark detection, and attribute recognition. For each of these tasks, the survey paper examines recent advancements, discusses their strengths and limitations, and qualitative differences in approaches and outcomes. By exploring the latest developments in human shape and clothing estimation, this survey aims to provide a comprehensive understanding of the field and inspire future research in this rapidly evolving domain.
Vision based UAV Navigation through Narrow Passages
Mar 28, 2023This research paper presents a novel approach for navigating a micro UAV (Unmanned Aerial Vehicle) through narrow passages using only its onboard camera feed and a PID control system. The proposed method uses edge detection and homography techniques to extract the key features of the passage from the camera feed and then employs a tuned PID controller to guide the UAV through and out of the passage while avoiding collisions with the walls. To evaluate the effectiveness of the proposed approach, a series of experiments were conducted using a micro-UAV navigating in and out of a custom-built test environment (constrained rectangular box). The results demonstrate that the system is able to successfully guide the UAV through the passages while avoiding collisions with the walls.
RRT and Velocity Obstacles-based motion planning for Unmanned Aircraft Systems Traffic Management (UTM)
Feb 28, 2023



In this paper, an algorithm for Unmanned Aircraft Systems Traffic Management (UTM) for a finite number of unmanned aerial vehicles (UAVs) is proposed. This algorithm is developed by combining the Rapidly-Exploring Random Trees (RRT) and Velocity Obstacle (VO) algorithms and is referred to as the RRT-VO UTM algorithm. Here, the RRT algorithm works offline to generate obstacle-free waypoints in a given environment with known static obstacles. The VO algorithm, on the other hand, operates online to avoid collisions with other UAVS and known static obstacles. The boundary of the static obstacles are approximated by small circles to facilitate the formulation of VO algorithm. The proposed algorithm's performance is evaluated using numerical simulation and then compared to the well-known artificial potential field (APF) algorithm for collision avoidance. The advantages of the proposed method are clearly shown in terms of lower path length and collision avoidance capabilities for a challenging scenario.
When does deep learning fail and how to tackle it? A critical analysis on polymer sequence-property surrogate models
Oct 12, 2022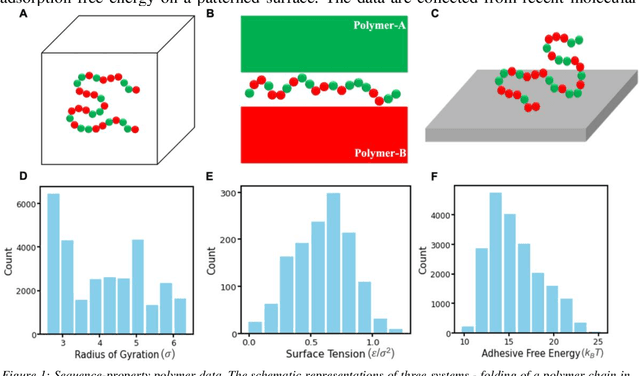
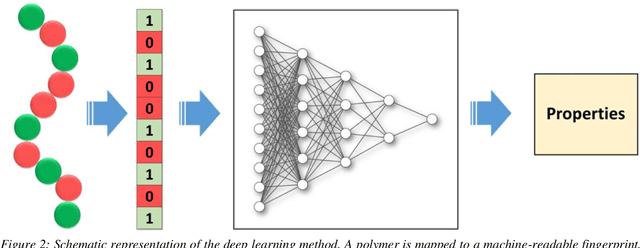
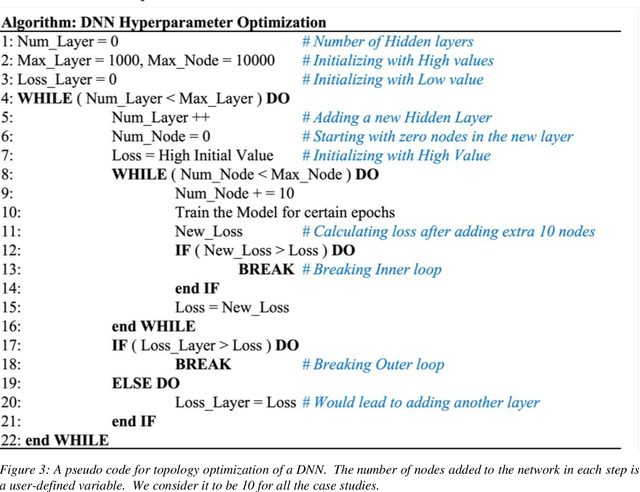
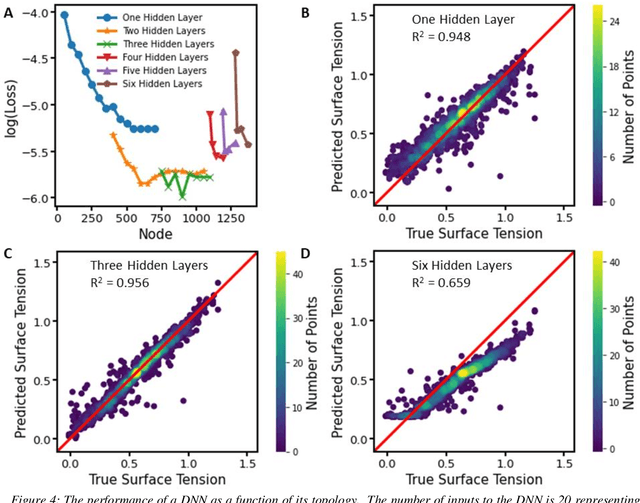
Deep learning models are gaining popularity and potency in predicting polymer properties. These models can be built using pre-existing data and are useful for the rapid prediction of polymer properties. However, the performance of a deep learning model is intricately connected to its topology and the volume of training data. There is no facile protocol available to select a deep learning architecture, and there is a lack of a large volume of homogeneous sequence-property data of polymers. These two factors are the primary bottleneck for the efficient development of deep learning models. Here we assess the severity of these factors and propose new algorithms to address them. We show that a linear layer-by-layer expansion of a neural network can help in identifying the best neural network topology for a given problem. Moreover, we map the discrete sequence space of a polymer to a continuous one-dimensional latent space using a machine learning pipeline to identify minimal data points for building a universal deep learning model. We implement these approaches for three representative cases of building sequence-property surrogate models, viz., the single-molecule radius of gyration of a copolymer, adhesive free energy of a copolymer, and copolymer compatibilizer, demonstrating the generality of the proposed strategies. This work establishes efficient methods for building universal deep learning models with minimal data and hyperparameters for predicting sequence-defined properties of polymers.