 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVizFlyt: Perception-centric Pedagogical Framework For Autonomous Aerial Robots
Apr 01, 2025Autonomous aerial robots are becoming commonplace in our lives. Hands-on aerial robotics courses are pivotal in training the next-generation workforce to meet the growing market demands. Such an efficient and compelling course depends on a reliable testbed. In this paper, we present VizFlyt, an open-source perception-centric Hardware-In-The-Loop (HITL) photorealistic testing framework for aerial robotics courses. We utilize pose from an external localization system to hallucinate real-time and photorealistic visual sensors using 3D Gaussian Splatting. This enables stress-free testing of autonomy algorithms on aerial robots without the risk of crashing into obstacles. We achieve over 100Hz of system update rate. Lastly, we build upon our past experiences of offering hands-on aerial robotics courses and propose a new open-source and open-hardware curriculum based on VizFlyt for the future. We test our framework on various course projects in real-world HITL experiments and present the results showing the efficacy of such a system and its large potential use cases. Code, datasets, hardware guides and demo videos are available at https://pear.wpi.edu/research/vizflyt.html
CrackUDA: Incremental Unsupervised Domain Adaptation for Improved Crack Segmentation in Civil Structures
Dec 20, 2024Crack segmentation plays a crucial role in ensuring the structural integrity and seismic safety of civil structures. However, existing crack segmentation algorithms encounter challenges in maintaining accuracy with domain shifts across datasets. To address this issue, we propose a novel deep network that employs incremental training with unsupervised domain adaptation (UDA) using adversarial learning, without a significant drop in accuracy in the source domain. Our approach leverages an encoder-decoder architecture, consisting of both domain-invariant and domain-specific parameters. The encoder learns shared crack features across all domains, ensuring robustness to domain variations. Simultaneously, the decoder's domain-specific parameters capture domain-specific features unique to each domain. By combining these components, our model achieves improved crack segmentation performance. Furthermore, we introduce BuildCrack, a new crack dataset comparable to sub-datasets of the well-established CrackSeg9K dataset in terms of image count and crack percentage. We evaluate our proposed approach against state-of-the-art UDA methods using different sub-datasets of CrackSeg9K and our custom dataset. Our experimental results demonstrate a significant improvement in crack segmentation accuracy and generalization across target domains compared to other UDA methods - specifically, an improvement of 0.65 and 2.7 mIoU on source and target domains respectively.
UAV-based Visual Remote Sensing for Automated Building Inspection
Sep 27, 2022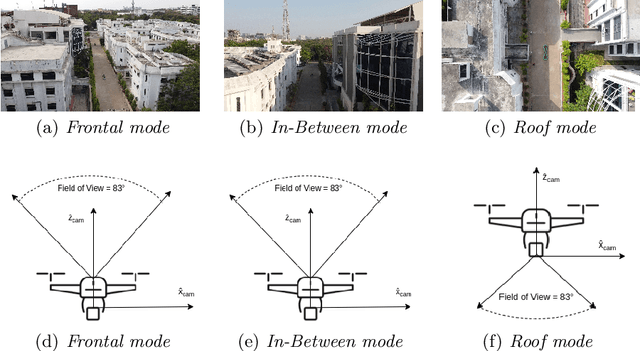
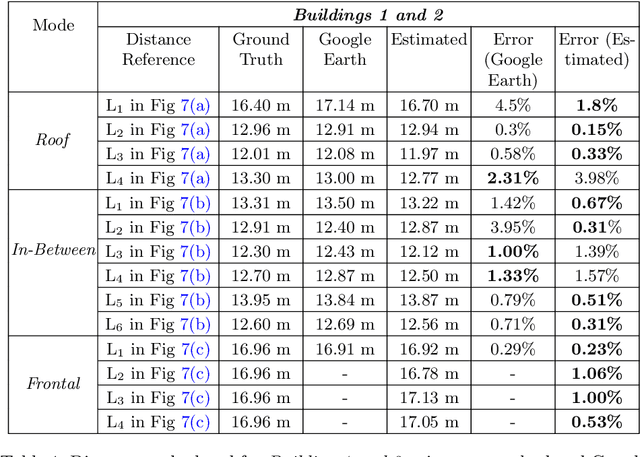
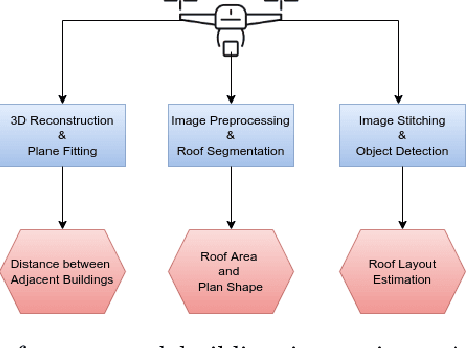
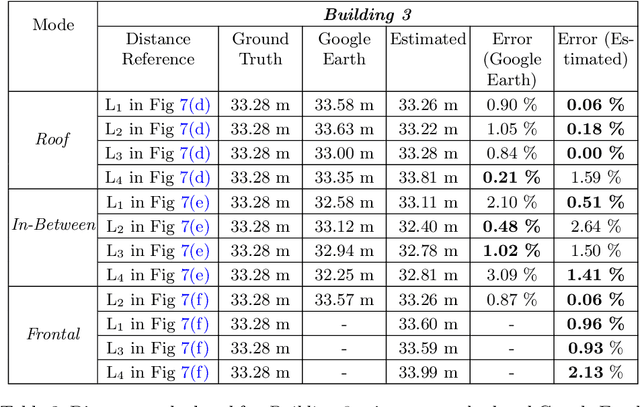
Unmanned Aerial Vehicle (UAV) based remote sensing system incorporated with computer vision has demonstrated potential for assisting building construction and in disaster management like damage assessment during earthquakes. The vulnerability of a building to earthquake can be assessed through inspection that takes into account the expected damage progression of the associated component and the component's contribution to structural system performance. Most of these inspections are done manually, leading to high utilization of manpower, time, and cost. This paper proposes a methodology to automate these inspections through UAV-based image data collection and a software library for post-processing that helps in estimating the seismic structural parameters. The key parameters considered here are the distances between adjacent buildings, building plan-shape, building plan area, objects on the rooftop and rooftop layout. The accuracy of the proposed methodology in estimating the above-mentioned parameters is verified through field measurements taken using a distance measuring sensor and also from the data obtained through Google Earth. Additional details and code can be accessed from https://uvrsabi.github.io/ .