 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Modal UAV Detection, Classification and Tracking Algorithm -- Technical Report for CVPR 2024 UG2 Challenge
May 26, 2024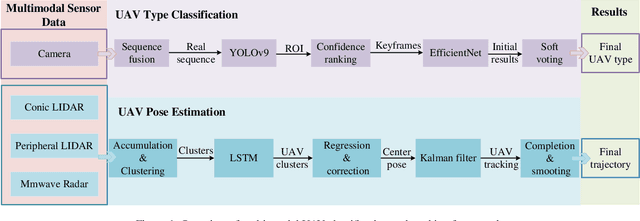
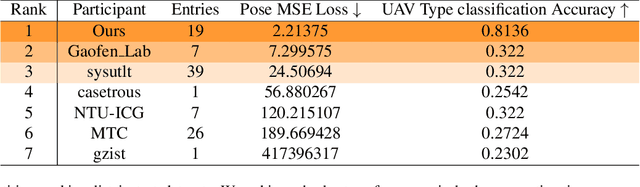
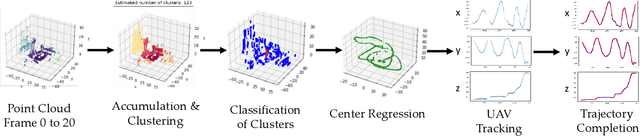
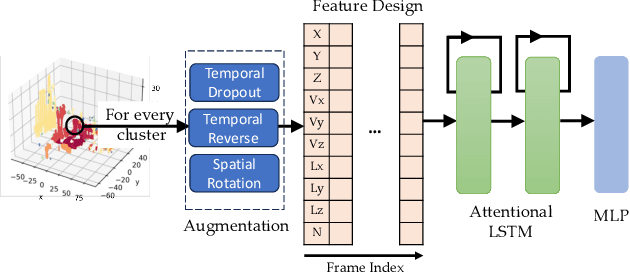
This technical report presents the 1st winning model for UG2+, a task in CVPR 2024 UAV Tracking and Pose-Estimation Challenge. This challenge faces difficulties in drone detection, UAV-type classification and 2D/3D trajectory estimation in extreme weather conditions with multi-modal sensor information, including stereo vision, various Lidars, Radars, and audio arrays. Leveraging this information, we propose a multi-modal UAV detection, classification, and 3D tracking method for accurate UAV classification and tracking. A novel classification pipeline which incorporates sequence fusion, region of interest (ROI) cropping, and keyframe selection is proposed. Our system integrates cutting-edge classification techniques and sophisticated post-processing steps to boost accuracy and robustness. The designed pose estimation pipeline incorporates three modules: dynamic points analysis, a multi-object tracker, and trajectory completion techniques. Extensive experiments have validated the effectiveness and precision of our approach. In addition, we also propose a novel dataset pre-processing method and conduct a comprehensive ablation study for our design. We finally achieved the best performance in the classification and tracking of the MMUAD dataset. The code and configuration of our method are available at https://github.com/dtc111111/Multi-Modal-UAV.
OCEAN: An Openspace Collision-free Trajectory Planner for Autonomous Parking Based on ADMM
Mar 08, 2024



In this paper, we propose an Openspace Collision-freE trAjectory plaNner (OCEAN) for autonomous parking. OCEAN is an optimization-based trajectory planner accelerated by Alternating Direction Method of Multiplier (ADMM) with enhanced computational efficiency and robustness, and is suitable for all scenes with few dynamic obstacles. Starting from a hierarchical optimization-based collision avoidance framework, the trajectory planning problem is first warm-started by a collision-free Hybrid A* trajectory, then the collision avoidance trajectory planning problem is reformulated as a smooth and convex dual form, and solved by ADMM in parallel. The optimization variables are carefully split into several groups so that ADMM sub-problems are formulated as Quadratic Programming (QP), Sequential Quadratic Programming (SQP),and Second Order Cone Programming (SOCP) problems that can be efficiently and robustly solved. We validate our method both in hundreds of simulation scenarios and hundreds of hours of public parking areas. The results show that the proposed method has better system performance compared with other benchmarks.